

Active compliance end effector for controllable-pitch propeller robot grindingand control method of active compliance end effector
An end-effector and robot technology, applied in the direction of grinding automatic control devices, grinding machine parts, grinding/polishing equipment, etc., can solve the problems of limited control accuracy, harsh environment, low processing efficiency, etc. And the effect of high response speed, high control precision and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
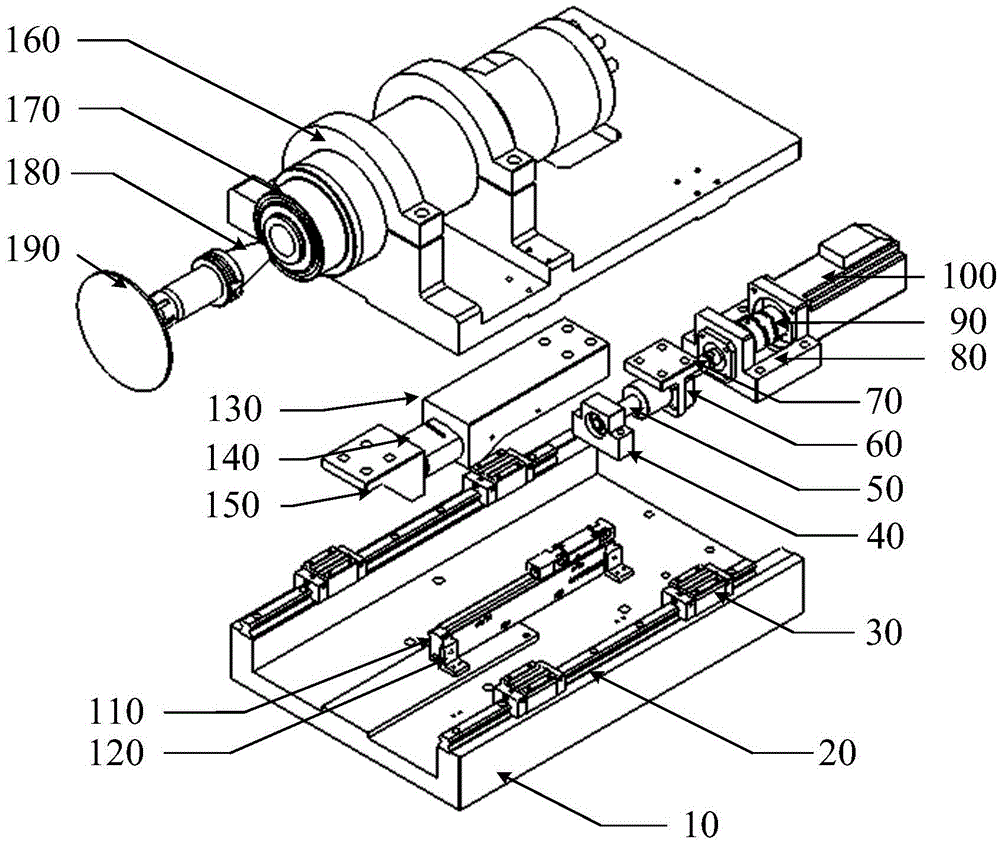
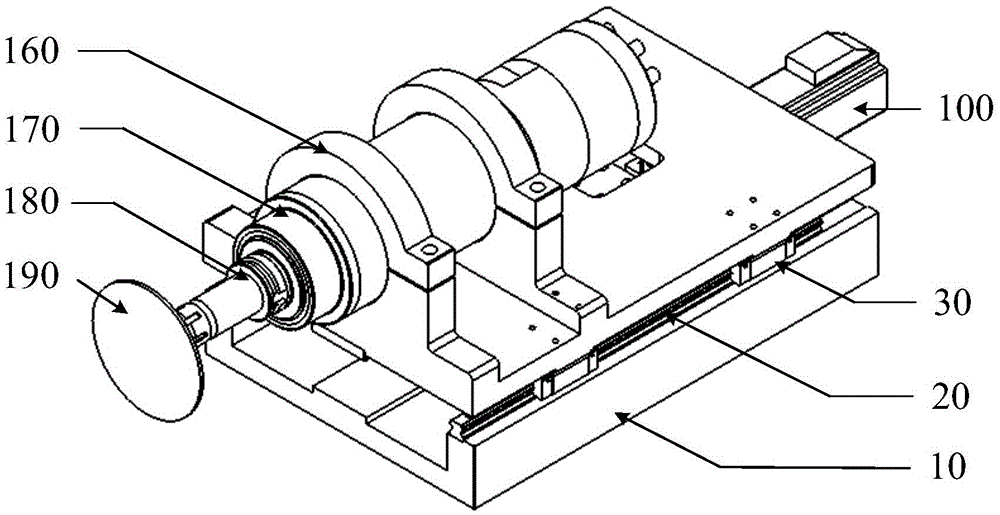
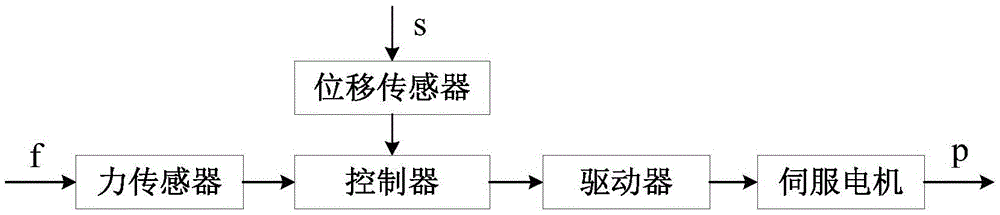
[0035] Such as figure 1 , 2As shown, it is a structural schematic diagram of an end effector realized according to the present invention, wherein the end effector includes: a bottom support plate 10, a linear guide rail 20, a slider 30, a bearing housing 40, a ball screw 50, and a ball screw nut 60 , ball screw nut support 70, motor flange assembly 80, elastic coupling 90, servo motor 100, displacement sensor 110, displacement sensor support 120, force sensor right support 130, force sensor 140, force sensor left support Seat 150, grinding electric spindle support 160, grinding electric spindle 170, BT30 handle 180, grinding tool 190, etc. constitute the end effector, and the end effector control system consists of driver 2, controller 3, etc. The active compliance end effector is a single-degree-of-freedom mechanism. It mainly uses the force sensor 140 to detect the normal grinding force when the grinding electric spindle 170 is in contact with the workpiece, and the displac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More