

Robot autonomous navigation method based on heading-assisting distributed type SLAM (Simultaneous Localization and Mapping)
A technology for autonomous navigation and robotics, applied in the direction of navigation calculation tools, etc., can solve problems such as the inability to guarantee the considerable system, the inconvenience of the calculation amount to apply the real-time system, and the instability of the calculation amount.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
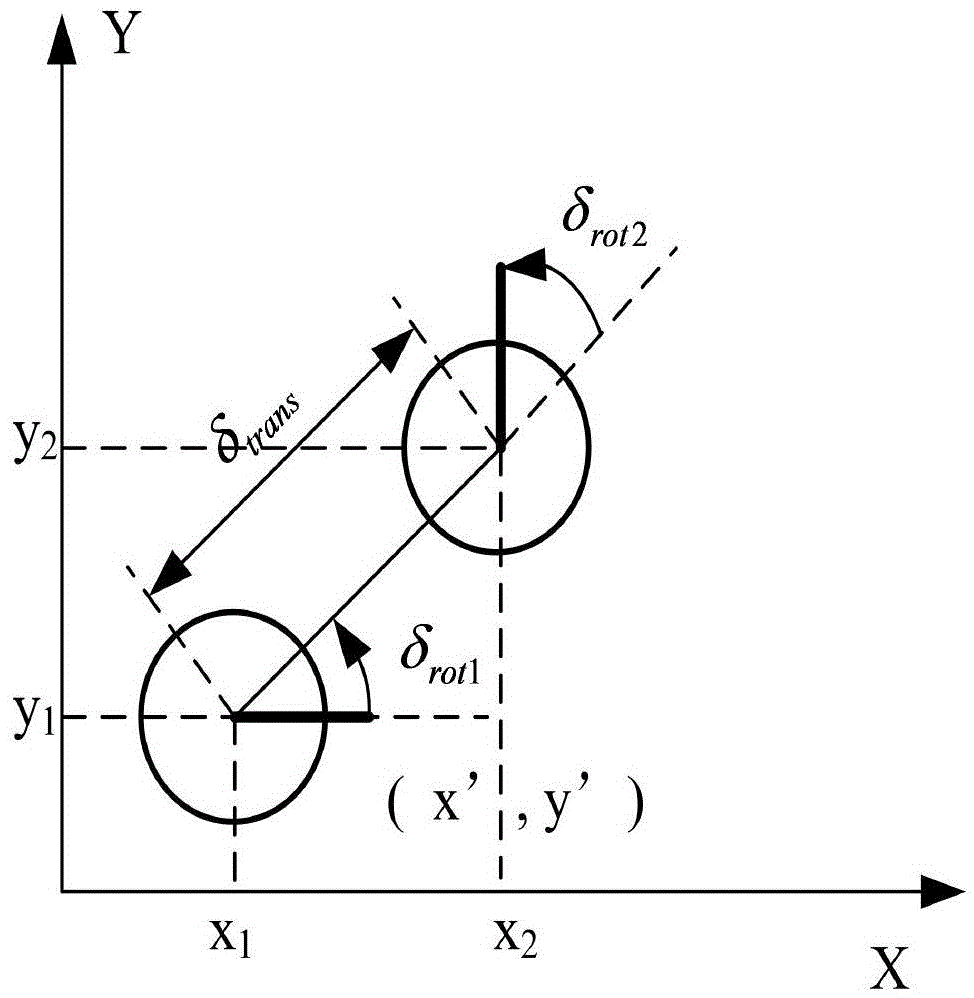
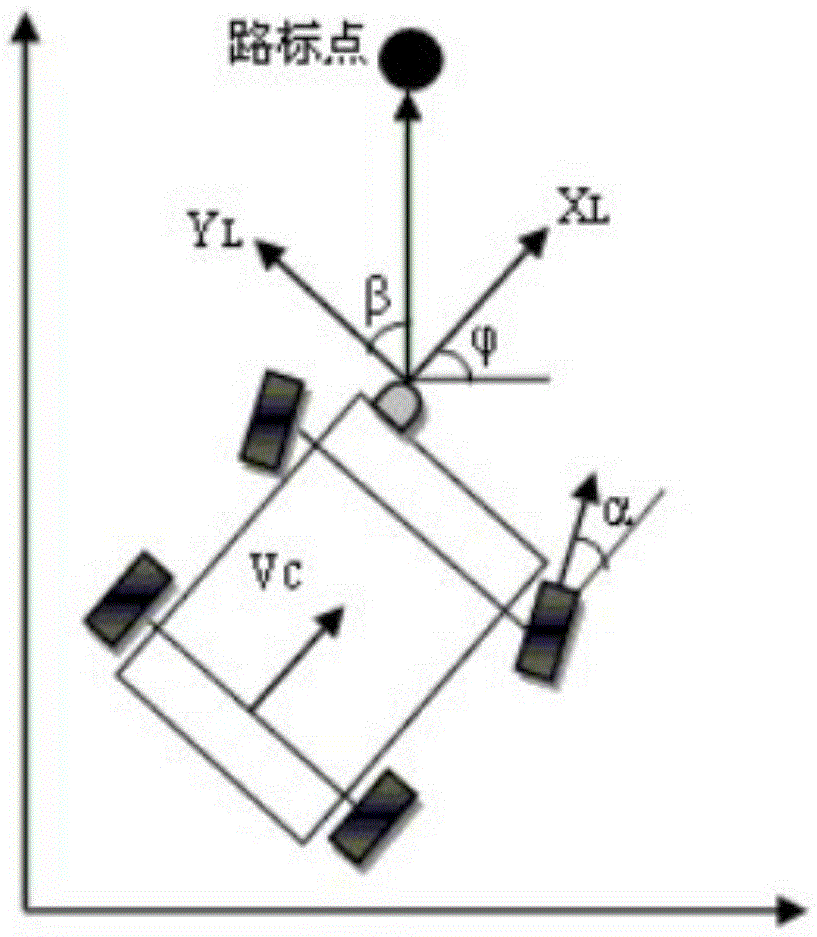
[0057] Step 1: Model establishment
[0058] The establishment of the system model is defined based on the three coordinate systems of the robot, environmental features and sensors. figure 1 and figure 2 The state transition equation and the coordinate system in the odometer prediction model are established. The present invention selects the Cartesian coordinate system as the representation form of the Cartesian coordinates, puts the sensor coordinate system into the robot coordinate system, and only adopts the global coordinate system and the robot coordinate system. The information contained in the state transition matrix is determined by the position information of the robot body and the position information of a landmark point. i.e. x v =[x L ,y L ,φ L ,x i ,y i ] T , to establish the motion model and observation model, see formula (1) (2), both use the output of the odometer and the output of the laser sensor to estimate the position information of the correspon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More