

An Intelligent Prosthetic Hand Control System
A technology of control system and prosthetic hand, which is applied in the direction of prosthesis, medical science, etc., can solve the problems of missing, lack of monitoring function, and the inability to effectively display the speed, position information and changes of the prosthetic hand in real time, so as to achieve current isolation and avoid effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical problems solved by the present invention, the technical solutions adopted and the technical effects achieved more clearly, the technical solutions of the embodiments of the present invention will be described in further detail below with reference to the accompanying drawings. Obviously, the described embodiments are only the present invention. Some examples, but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts shall fall within the protection scope of the present invention.
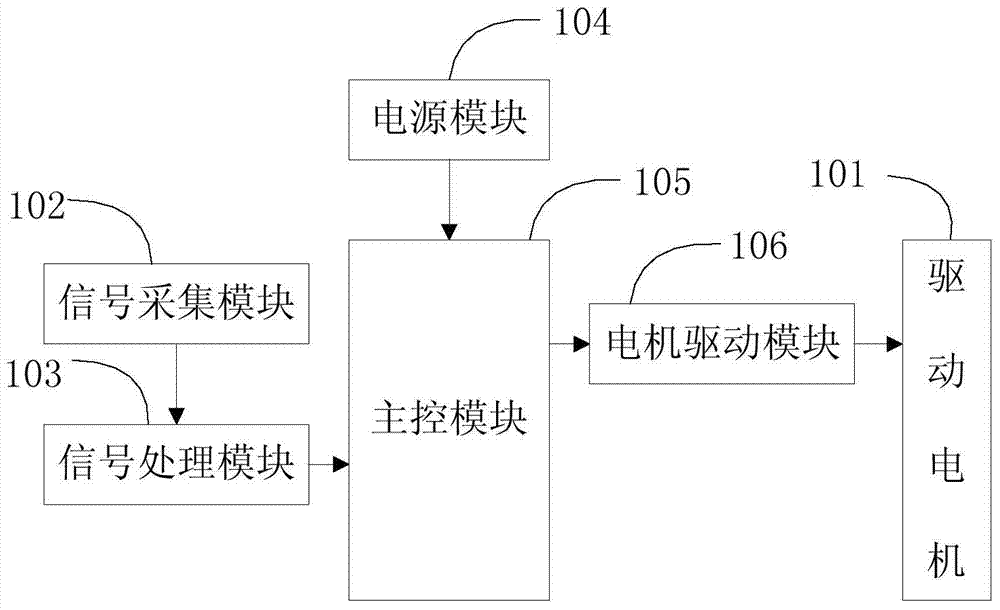
[0031] Please refer to figure 1 , which is a structural block diagram of the first embodiment of an intelligent prosthetic hand control system provided by an embodiment of the present invention. The intelligent prosthetic hand control system of this embodiment is mainly applied to the upper limb disabled person to control the prosthetic limb to restore the limb fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More