

Network mobile robot locus tracking control method based on linearity auto-disturbance rejection
A mobile robot, linear active disturbance rejection technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of complex design process, poor flexibility, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings.
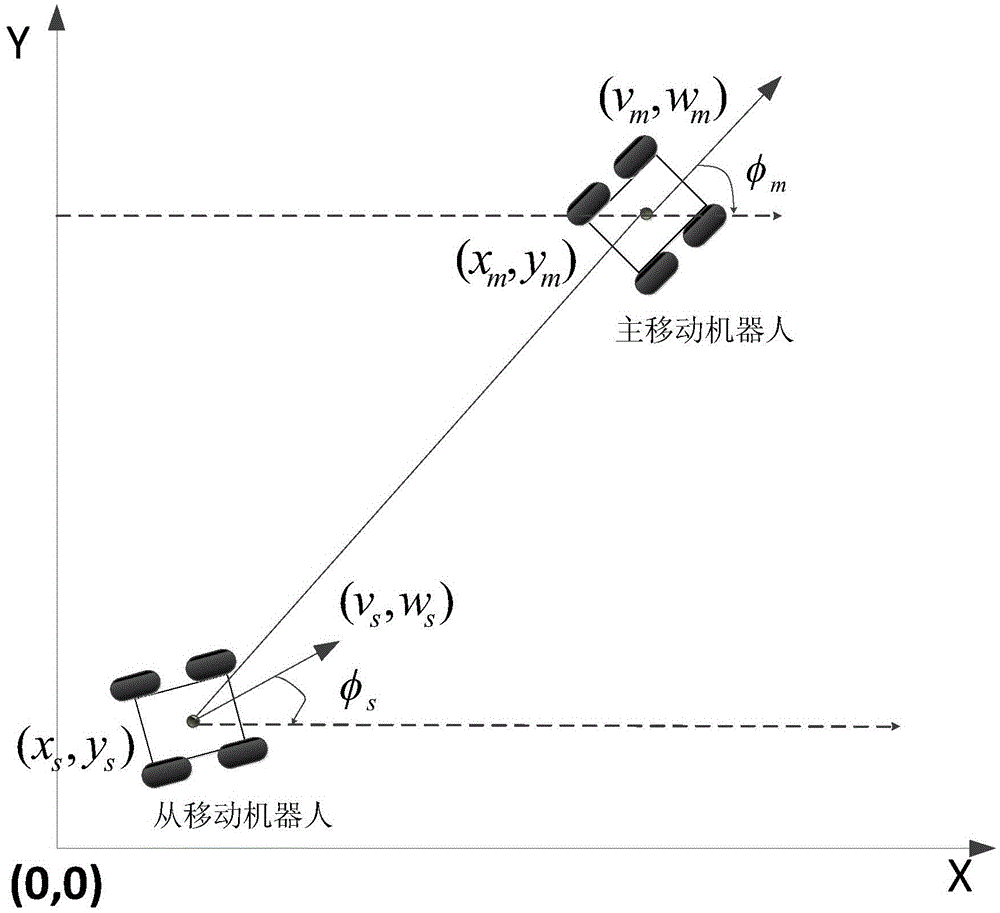
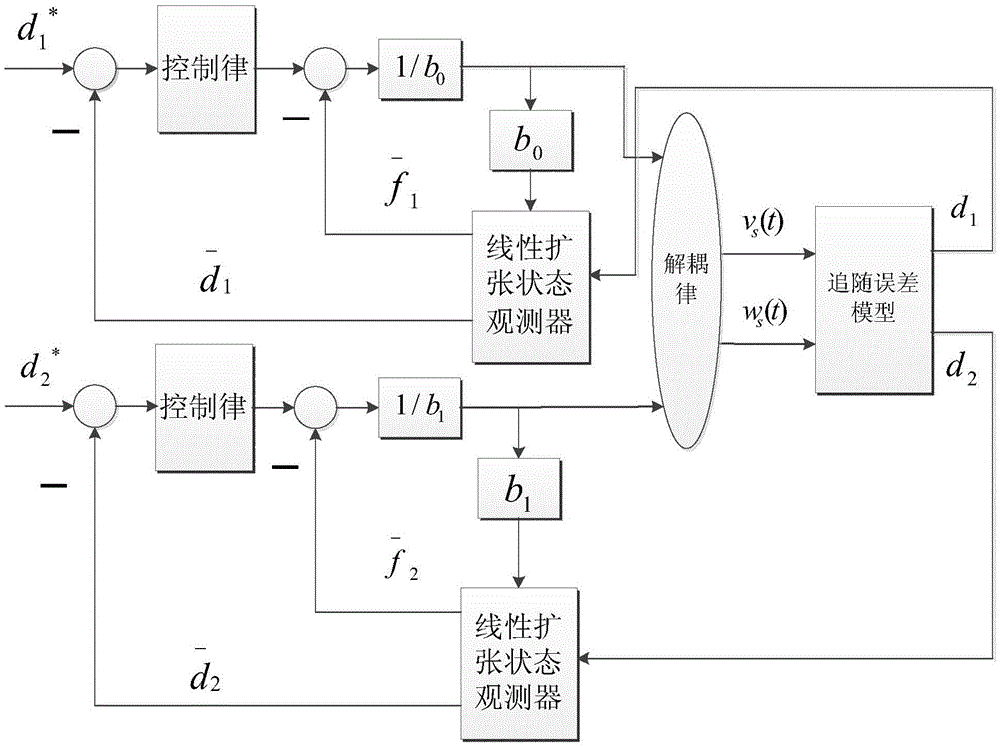
[0047] refer to Figure 1 to Figure 3 , a networked mobile robot trajectory tracking control method based on linear active disturbance rejection, the method includes the following steps:
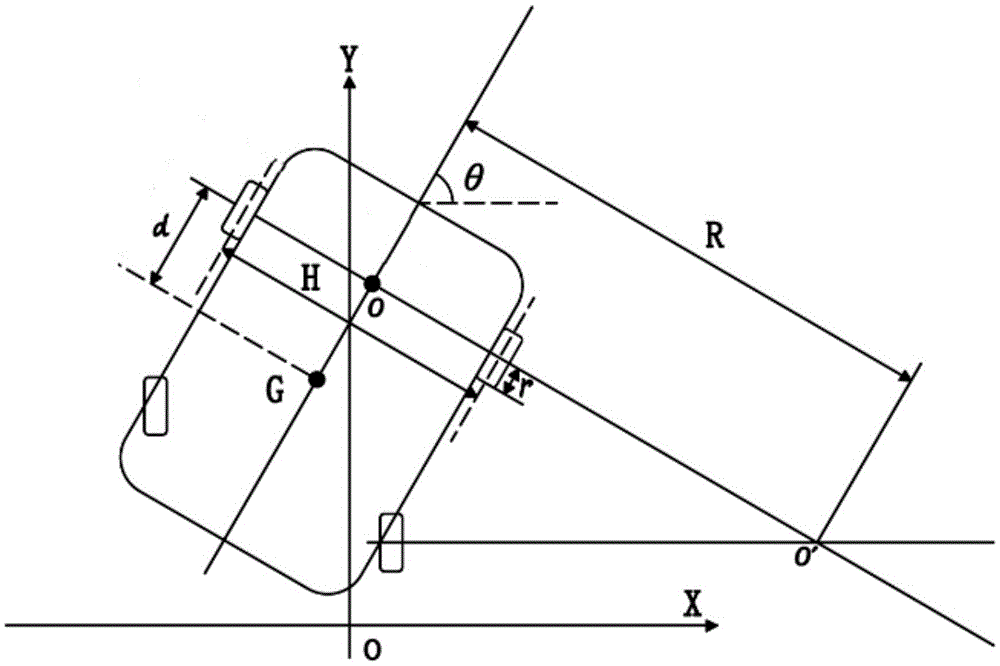
[0048] Step 1) According to the dynamic characteristics of the mobile robot, analyze its kinematics in the established global coordinate system, and assume that the center of mass and the axis of the driving wheel do not coincide, there is a distance d, and the tangential velocity is introduced in the velocity decomposition, so as to obtain a more A kinematic model that conforms to the actual situation;
[0049] Establish the kinematic model of the mobile robot:
[0050] x · ( t ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More