

ACC (adaptive cruise control) system and method for four-wheel hub motor electric vehicle
An adaptive cruise and control system technology, applied in electric braking systems, electric vehicles, control devices, etc., can solve problems such as less consideration of the relationship between the inter-vehicle distance and vehicle speed, and driver incompatibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
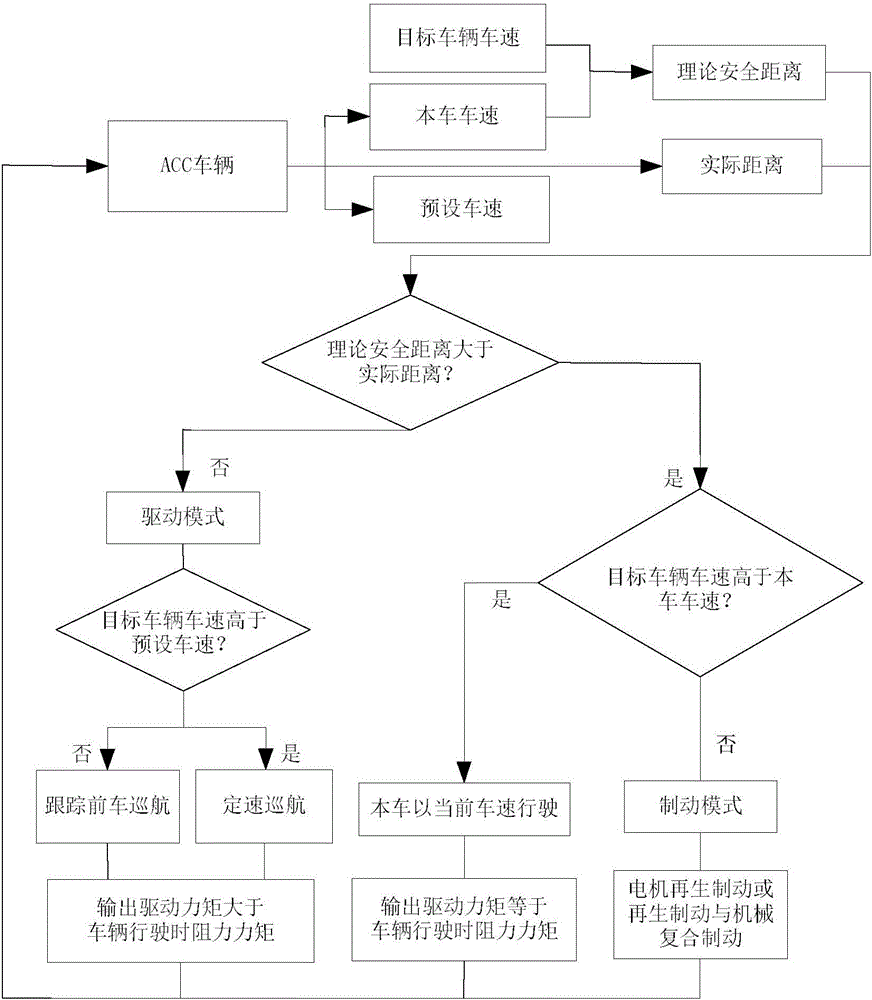
[0048] Such as figure 1 As shown, the present invention provides a four-wheel hub motor electric vehicle adaptive cruise control system and method, comprising the following steps:
[0049] 1. Adaptive cruise control strategy for electric vehicles
[0050] The adaptive cruise control (ACC) controller calculates the theoretical safety distance under the condition that the relative speed of the two vehicles is constantly changing according to the speed of the target vehicle in front, the lateral displacement of the front vehicle, the actual relative distance between the two vehicles and the vehicle speed measured by the sensor information, Then control the vehicle to switch between braking and driving modes according to the difference between the theoretical safety distance and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More