

Wall-climbing robot used for measuring thickness of coating of water wall of boiler through mathematical modeling
A wall-climbing robot and mathematical modeling technology, which is applied in the field of wall-climbing robots, can solve the problems of large area, inconvenient measurement, and scattered position of water-cooled wall tube thickness detection, and achieves the effect of high degree of automation, small size and light weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
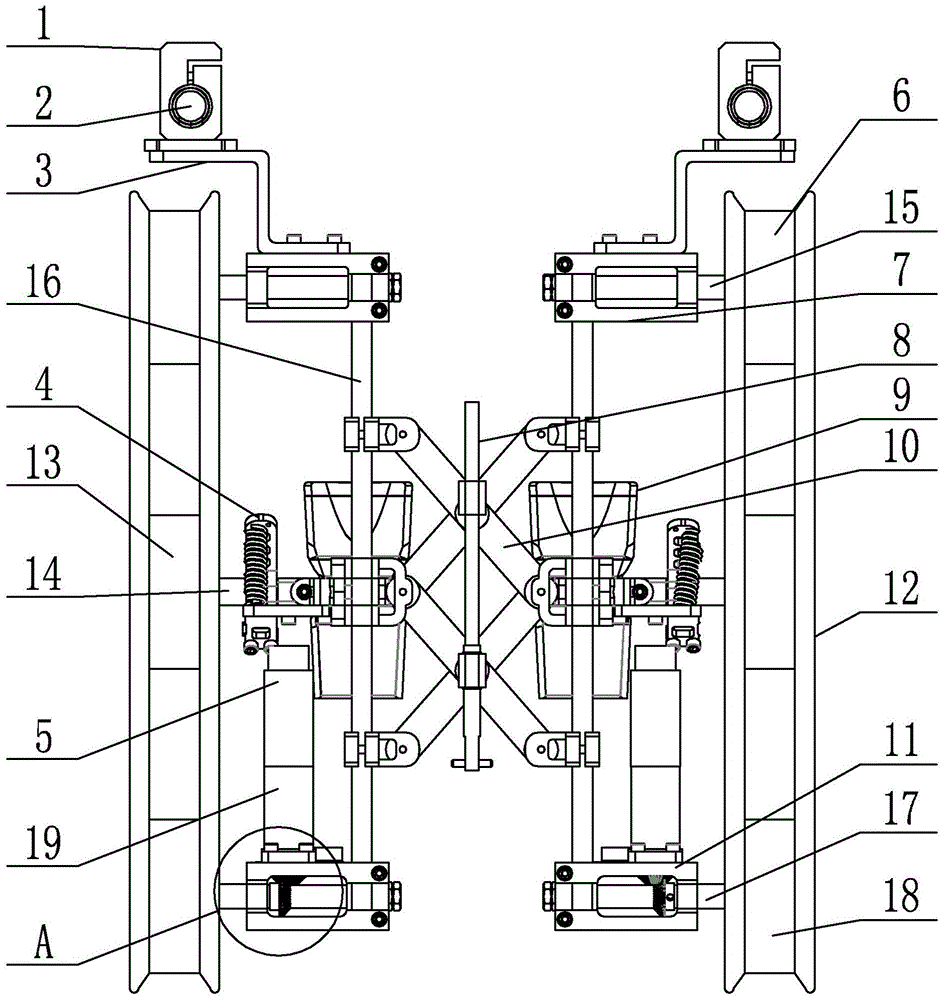
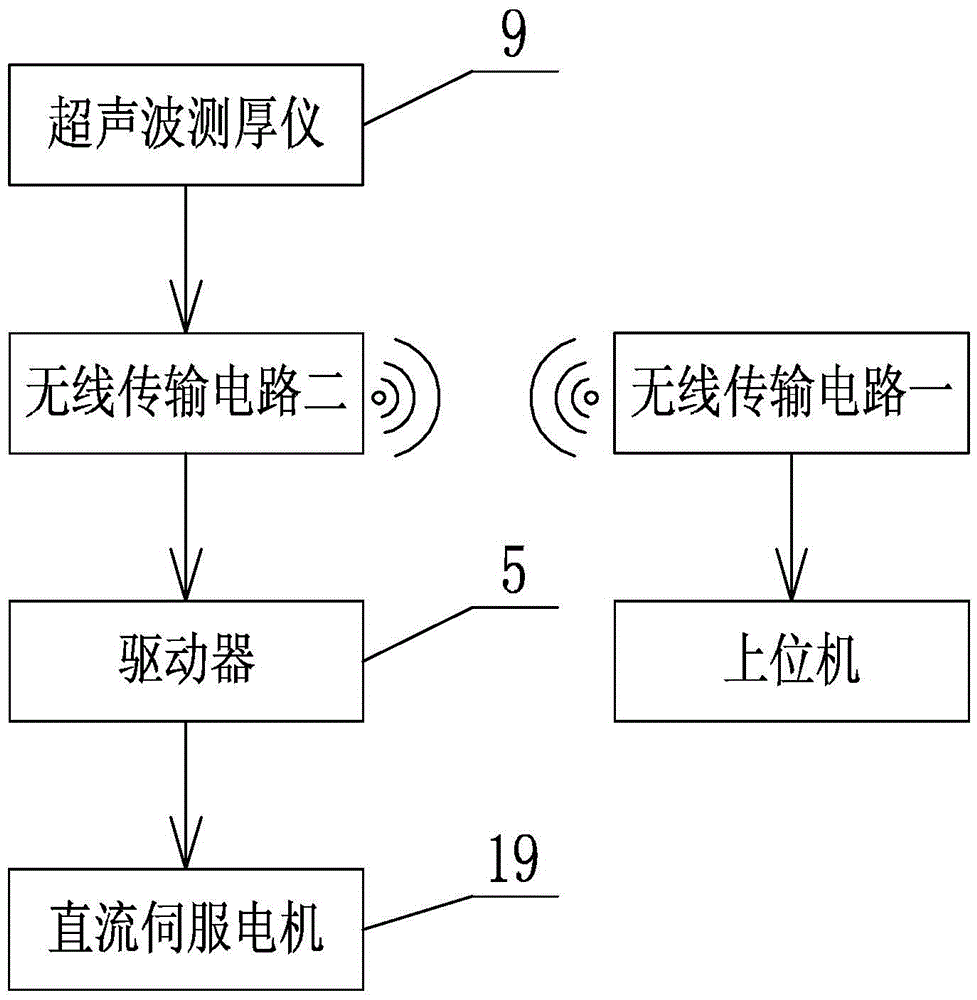
[0020] Specific implementation mode one: refer to Figure 1 to Figure 3 This embodiment is described in detail. The wall-climbing robot that uses mathematical modeling to measure the thickness of the cladding layer of the boiler water wall described in this embodiment includes: a wireless transmission circuit 1, a host computer, a connecting part, and two left-right symmetrical structures. Round Group;
[0021] The connection part includes: a shock absorber group, a shock absorber support frame and a lead screw 8;
[0022] The shock-absorbing sheet group is in the shape of a grid, and the shock-absorbing sheet group can be stretched horizontally and vertically. The shock-absorbing sheet support frame includes two parts separated from each other. The two parts are hinged, the lead screw 8 is used to drive the shock absorber group to perform telescopic movement, and the two wheel groups are respectively fixed on the two parts of the shock absorber support frame;
[0023] Each ...
specific Embodiment approach 2
[0038] Specific embodiment two: this embodiment is a further description of the wall-climbing robot that uses mathematical modeling to measure the thickness of the boiler water wall cladding layer described in specific embodiment one. In this embodiment, it also includes: a front probe bracket 1 , probe sleeve 2 and rear probe bracket 3;
[0039] The rear probe bracket 3 is fixed on the secondary wheel support frame 7, the front probe bracket 1 is fixed on the rear probe bracket 3, the probe sleeve 2 is fixed on the front probe bracket 1, and the probe sleeve 2 is used to support the ultrasonic thickness gauge 9. probe.
specific Embodiment approach 3
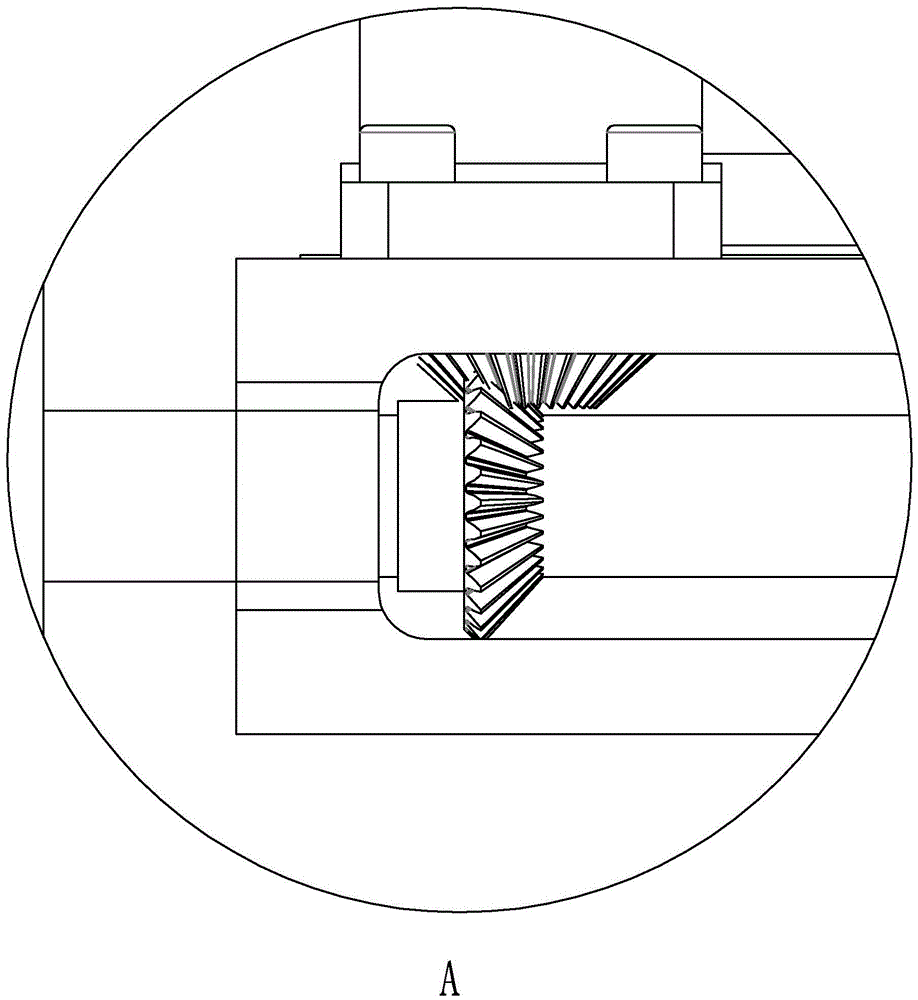
[0040] Specific embodiment three: This embodiment is a further description of the wall-climbing robot that uses mathematical modeling to measure the thickness of the boiler water wall cladding layer described in specific embodiment one. In this embodiment, the main wheel 18 and the slave wheel 6 The cross section is trapezoidal.
[0041] The master wheel 18 and the driven wheel 6 are the main components driving the movement of the transmission chain 12, and the sections of the master wheel 18 and the driven wheel 6 are trapezoidal; When the robot encounters obstacles in the process of crawling, it acts as a shock absorber.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More