

Under-actuated unmanned ship formation structure based on model ships
An unmanned ship, underactuated technology, applied in non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve problems such as lack of understanding of ships, few real ship experiments, and experimental failures, and increase the number of ships in formation. Quantity, ease of operation, the effect of reducing difficulty and cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
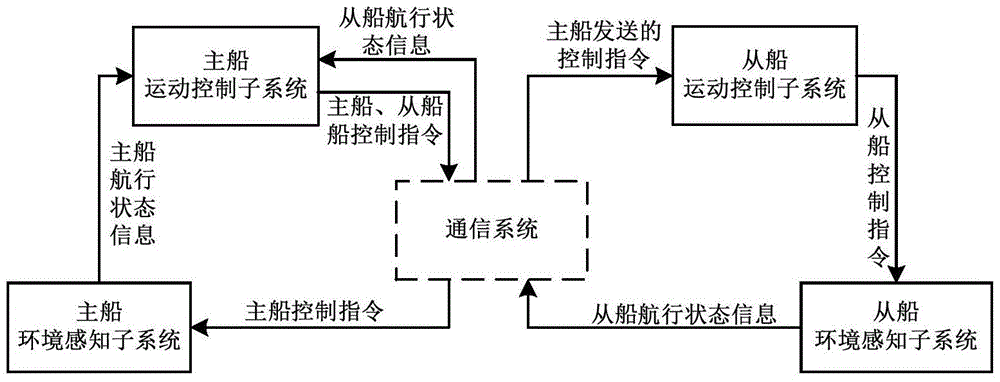
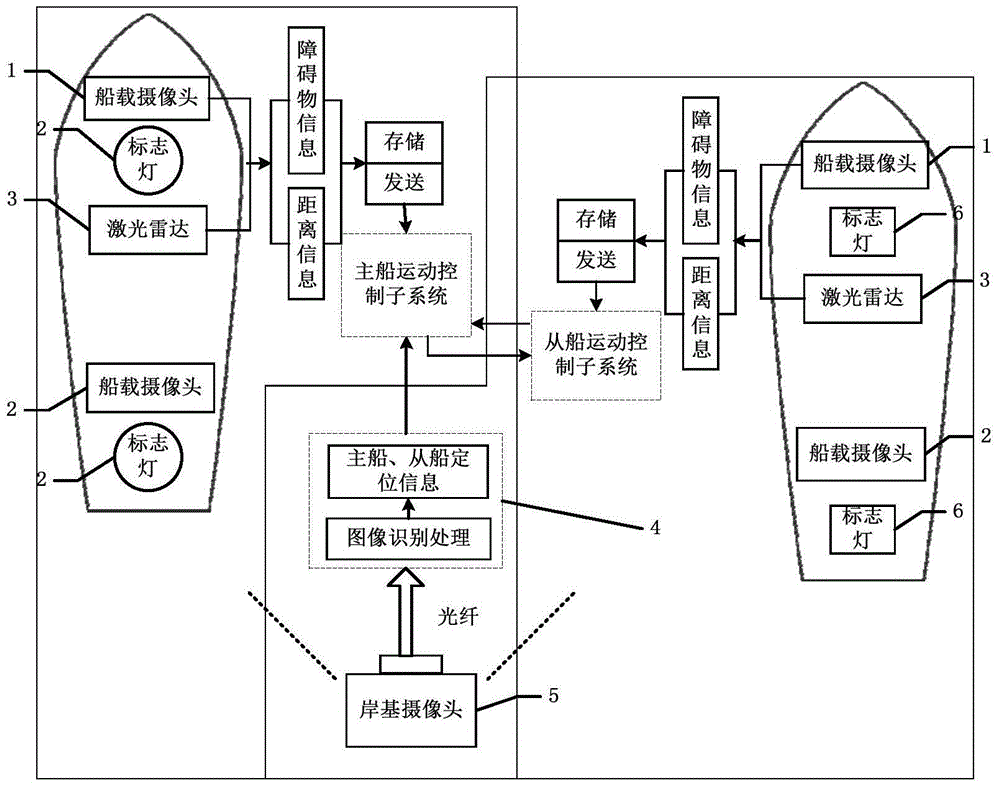
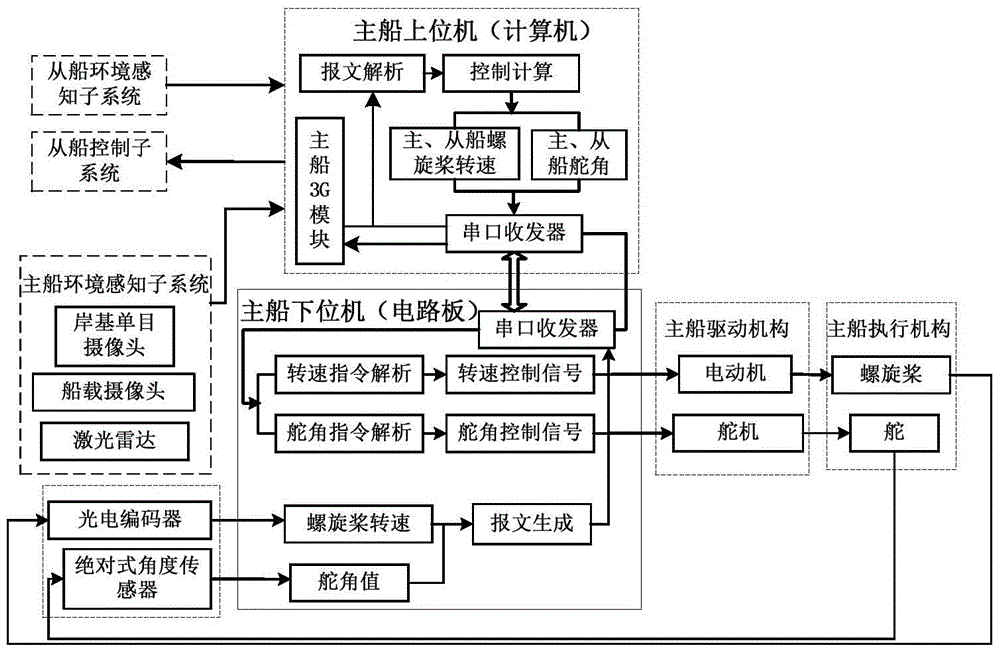
[0025] The invention provides a model ship-based underactuated unmanned ship formation structure, such as figure 1 As shown, it includes several model ships set in the simulated channel, and the simulated environmental factors are set in the simulated channel; one of the model ships is the master ship, and the other model ships are slave ships; the master ship is equipped with a master ship simulation control system, and the slave ship The ship is equipped with a slave ship simulation control system, and the shore base is equipped with a positioning information monitoring system. The main ship simulation control system, slave ship simulation control system and positioning information monitoring system are connected through the network; the positioning information monitoring system includes The shore-based camera for image recognition and positioning o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More