

Underground robot communication control system based on wireless sensor network
A wireless sensor and sensor network technology, applied in wireless communication, signal transmission system, network topology, etc., can solve the problems of unusable wireless communication system and affecting the working distance of underground robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
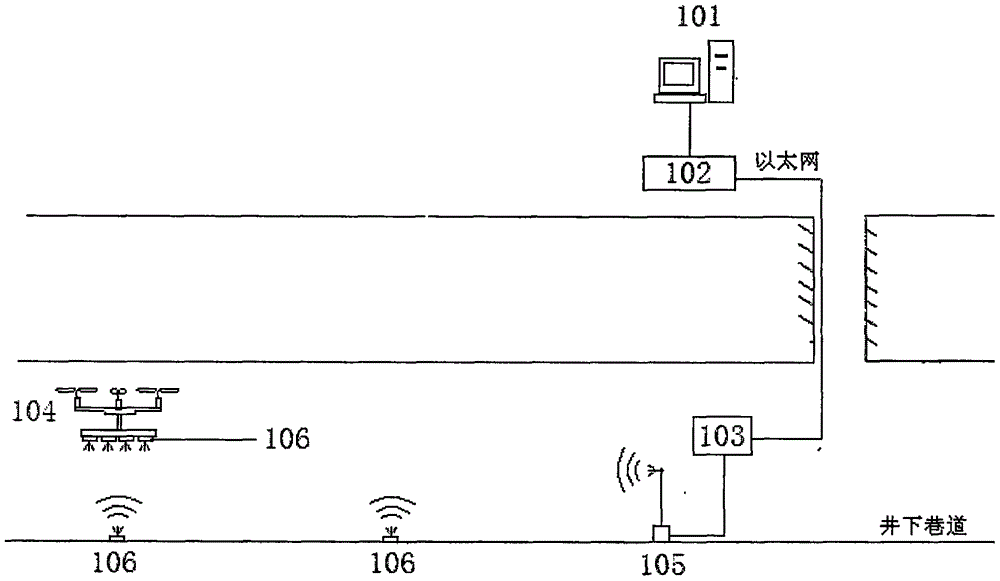
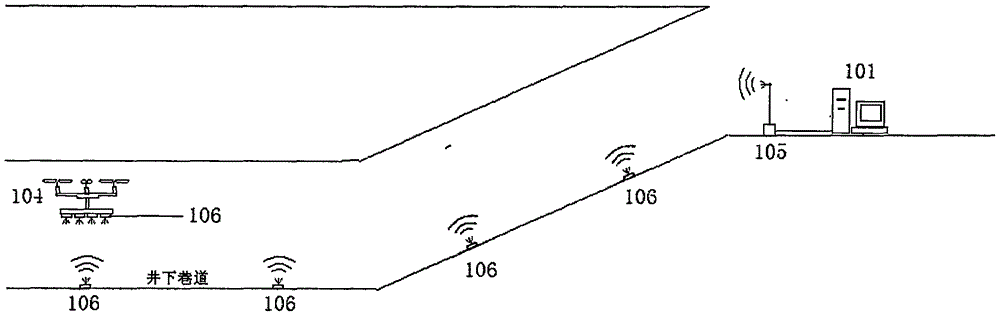
[0023] The specific implementation manner of the communication control system 1 is as figure 1 As shown, the composition includes:
[0024] 1. Robot control equipment (101), responsible for controlling the downhole robot, receiving various data uploaded by the downhole robot through the multi-hop wireless sensor network and Ethernet, including video or image data, various sensor data, and voice data; and multi-hop wireless sensor network to send control data and voice data to the downhole robot.
[0025] 2. Inoue switch (102), responsible for management and data exchange of all devices connected to the Ethernet.
[0026] 3. The downhole switch (103), responsible for data exchange of all devices connected to the Ethernet in the downhole.
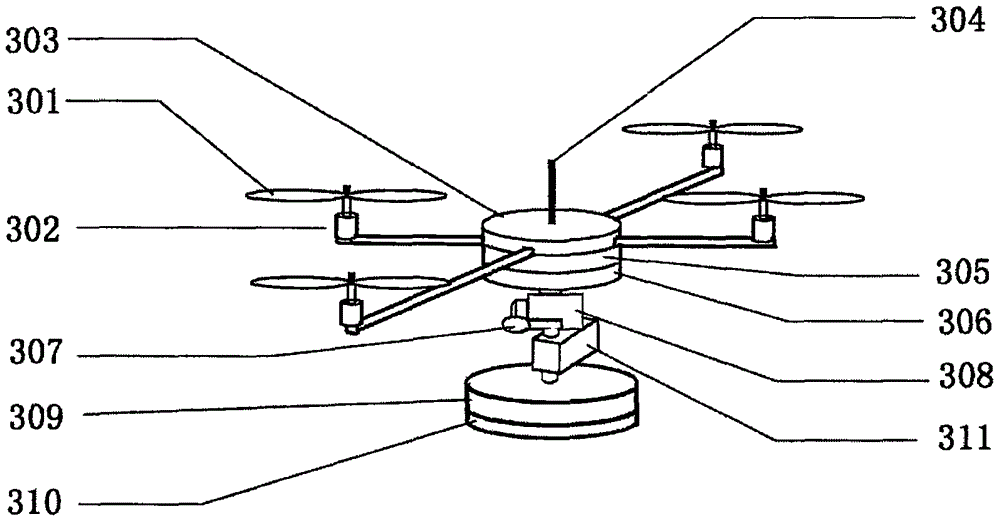
[0027] 4. The underground robot (104) can be a rotor flying robot, or a wheeled, crawler, snake-like robot that travels on the ground, carrying a plurality of Wifi routing devices (106) for distributing nets during travel.
[0028] 5. Wire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More