

Hydraulic motor preset performance tracking control method with hysteresis compensation
A hydraulic motor, tracking control technology, applied in the field of control, can solve problems such as high gain feedback, system hysteresis nonlinearity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
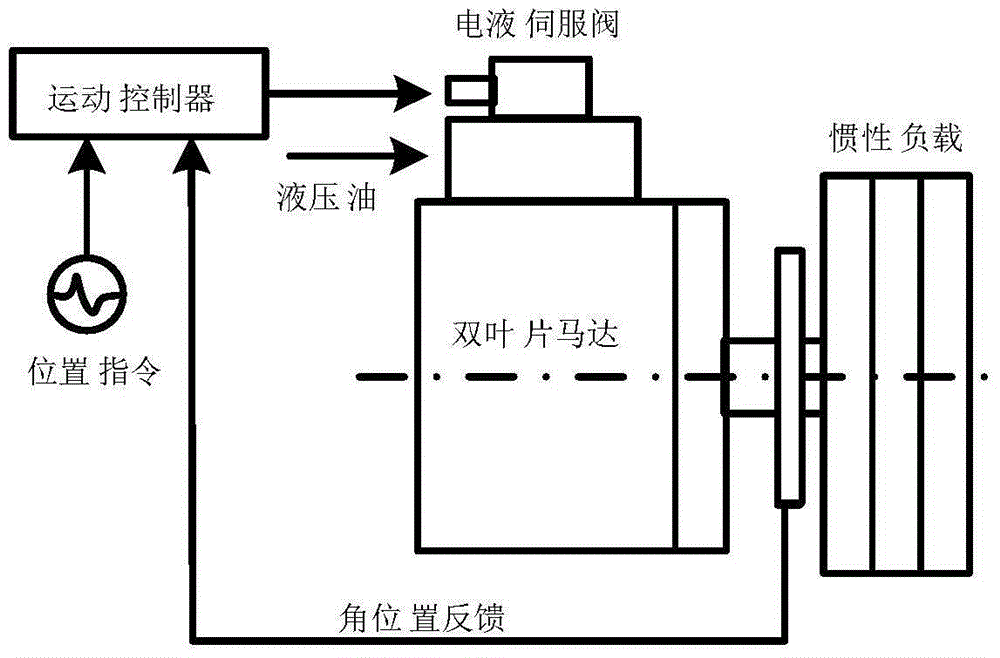
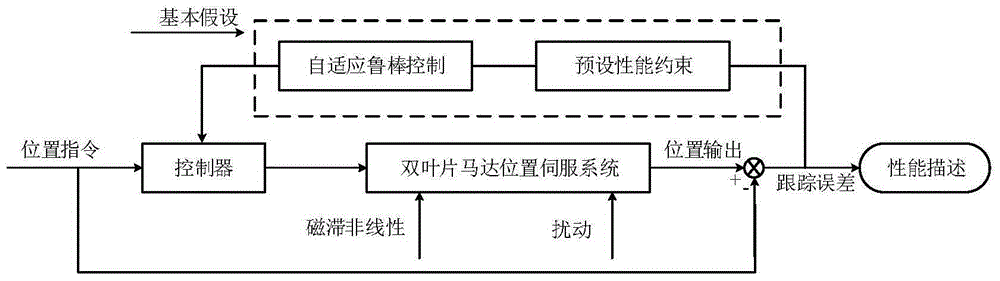
[0061] Specific implementation mode one: combine figure 1 and figure 2 To illustrate this embodiment, the specific steps of a hydraulic motor preset performance tracking control method with hysteresis compensation described in this embodiment are as follows:
[0062] Step one (1), hysteresis characteristic model. Due to the discontinuous characteristics of the traditional gap hysteresis model, it is very unfavorable for the controller design of the nonlinear system. The present invention uses the following hysteresis model:
[0063] d u d t = α | d v d t | ( c v - u ) + B 1 d v ...
Embodiment
[0146] The parameters of the double-vane hydraulic motor position servo system are inertial loads: J=0.2kg m 2 ; B=90N m s / rad; k t =1.1969×10 -8 m 2 / s / V / Pa -1 / 2 , V t =1.16×10 -4 m 3 ;β e =700MPa; C t =1×10 12 m 3 / s / Pa;D m =5.8×10 -5 m 3 / rad;P s =10MPa; P r =0.
[0147] In order to fully verify the effectiveness of the controller designed in this paper, the traditional Adaptive Robust Control (ARC) is selected for comparison. The design steps of the traditional ARC controller are similar to the controller designed in this paper, but it lacks the planning of the preset performance function function, the corresponding parameter is selected as k 1 =150,k 2 =1000,k 3 =30.
[0148] In this paper, the controller (denoted as PPARC) is designed, that is, the formula (24): the parameters are selected as: k 1 =150,k 2=2000,k 3 = 30, ρ 0 =0.3, ρ ∞ = 0.001, k = 0.5, δ = 5, Adaptive law parameters are selected as Γ 1 =0.01, Γ 2 =8e-6,Γ 3 =1000, Γ 4 =1e-10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More