

Service-oriented movable manipulator system
A mobile manipulator, service-oriented technology, applied in manipulators, manufacturing tools, etc., can solve problems such as difficulty meeting actual needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
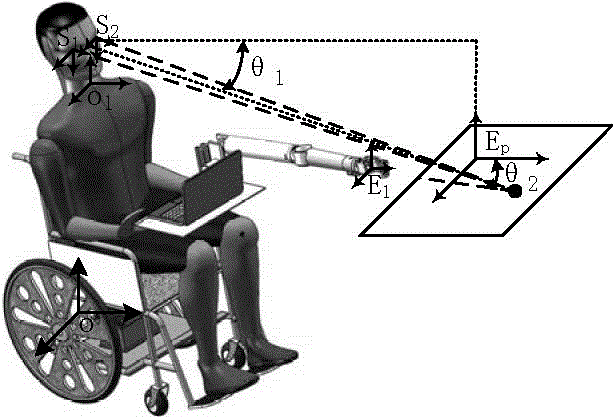
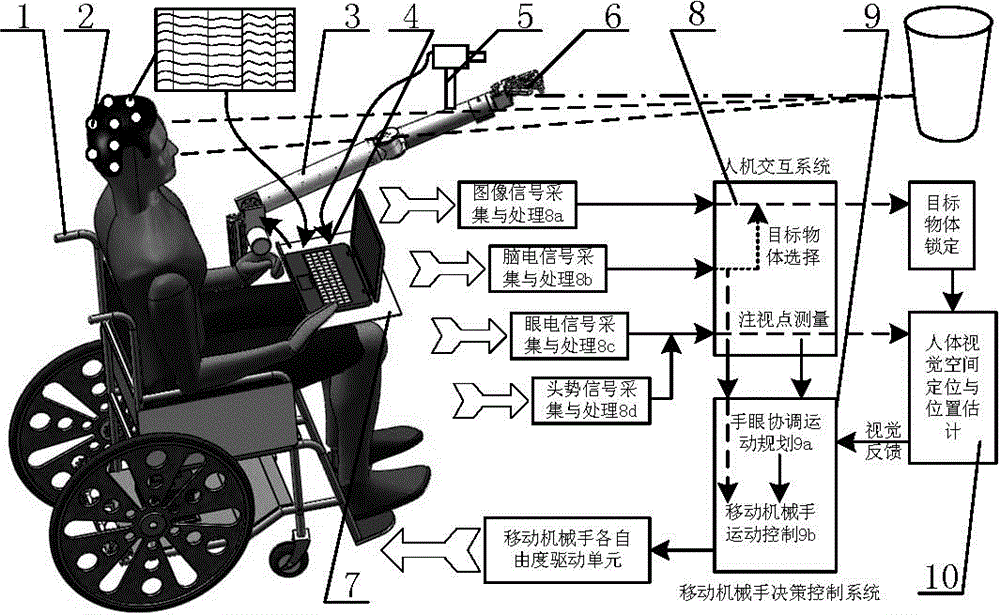
[0021] Service mobile manipulator system, see figure 1 , mainly including electric wheelchair 1, head information collection system 2, three-joint robotic arm 3, main control computer 4, camera 5, gripper 6, support plate 7, human-computer interaction system 8, mobile manipulator decision-making control system 9, Human visual space positioning and position estimation system 10 is composed.
[0022] (1) Head information collection system 2, which is composed of EEG signal, oculoelectric signal and head gesture signal acquisition sensors, uses EmotivEPOC EEG acquisition equipment to collect and preprocess EEG and EOG signals; The gyroscope collects the movement information of the human head.
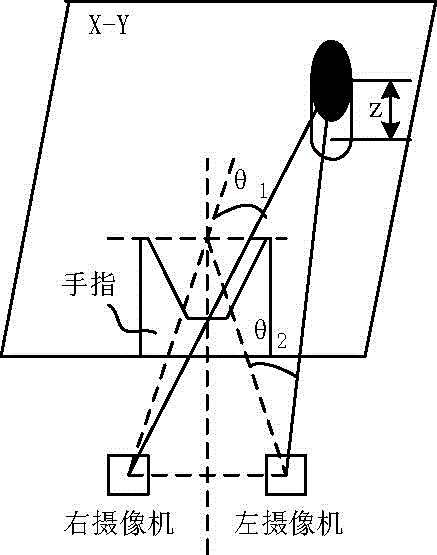
[0023] (2) The human visual space position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More