Unmanned aerial vehicle three-dimensional airway planning method based on space compression and table-lookup calculation
A technology of space compression and route planning, which is applied in the field of route planning and 3D route planning of UAVs, and can solve problems such as limited computing power and storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and examples, but the parameters thereof are not limitations of the present invention.
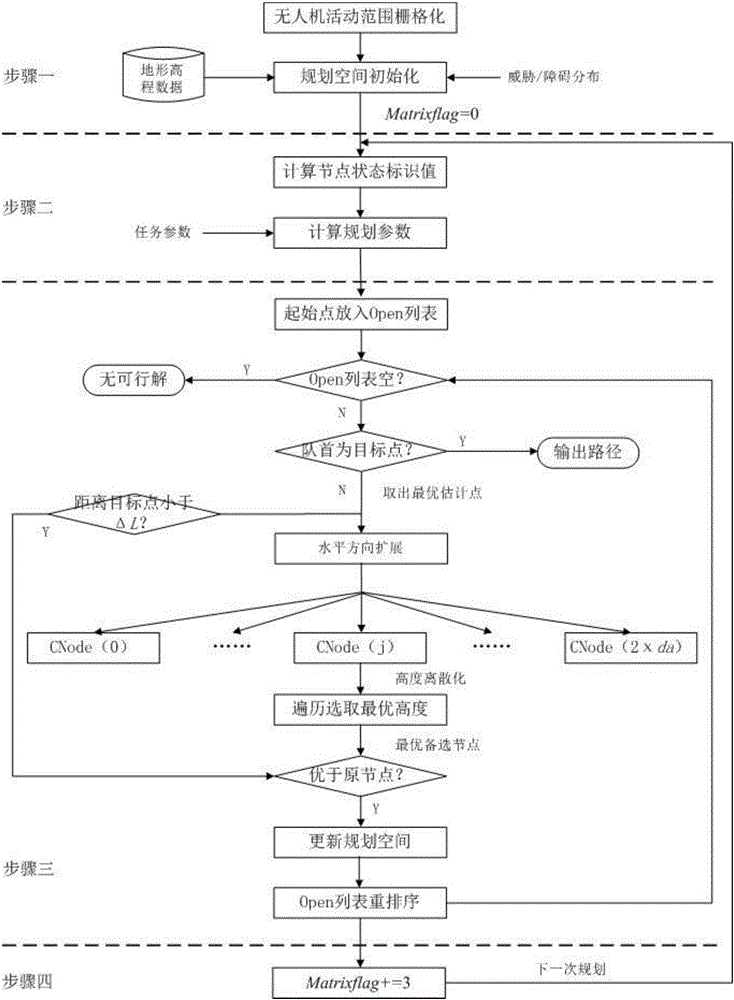
[0032] Step 1: Initialization and Environment Modeling
[0033] The horizontal plane projection of the UAV's activity range is evenly divided into Maxrow×Maxcol grids. The grid size is consistent with the accuracy of the terrain data file used. The number of grid rows Maxrow and the number of grid columns Maxcol are divided by the UAV's activity range. Obtained with the grid size, construct and initialize a Maxrow×Maxcol planning space matrix M as the mapping of the actual 3D search space, where Maxrow and Maxcol are the maximum number of rows and columns of the planning space matrix M respectively, construct an empty complete The minimum binary heap is used as the Open list of the A* algorithm, and the global variable reuse identifier of the planning space matrix M is initialized;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More