

Driving path planning method and device and automatic steering system
A driving path and driving route technology, applied in control/adjustment systems, vehicle position/route/height control, motor vehicles and other directions, can solve problems such as driving obstacles, restrictions, etc., to simplify operations, reduce forced merging, and reduce errors effect of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
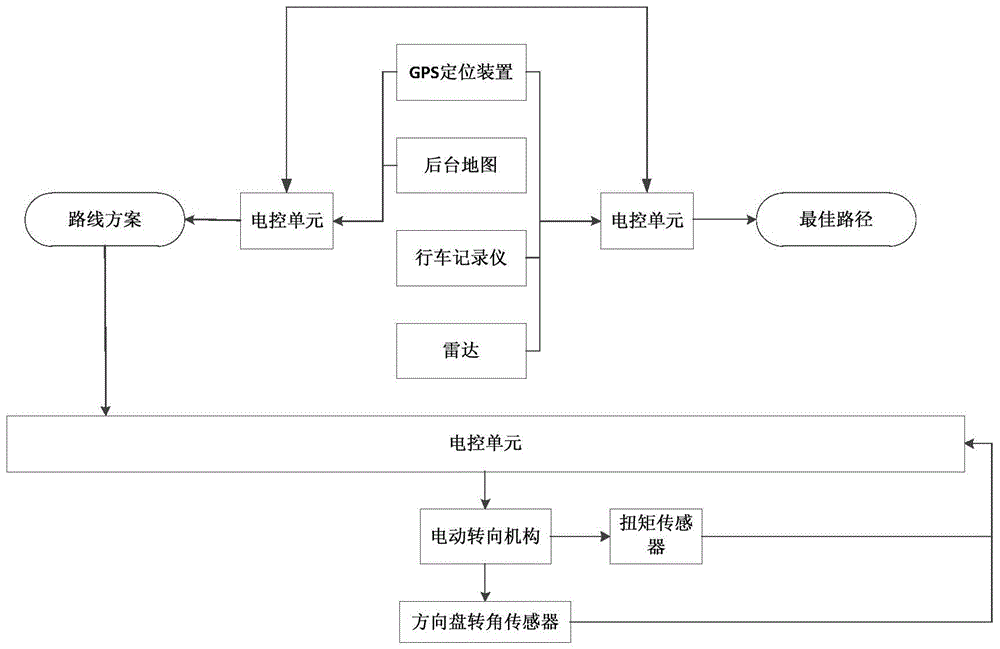
[0018] Example 1: A driving route planning method, in which a plurality of driving routes from the starting point to the ending point are planned by the background map, and one of the routes is selected for driving; during the driving process, the GPS positioning device verifies that the current driving route is the planned route; the GSP positioning device can locate in real time, The GPS positioning device plays a guiding role. First, there is a planned route, and then the GPS position represents the vehicle as a dynamic tracking point to describe the trajectory. That is to say, the GPS positioning position is always on the planned route of the background map and will not deviate; even if there is a wrong intersection, the system will re-plan a new route, and the GPS position will be used as the starting point of the new route In addition, GPS only has a positioning function, and what it represents is the precise position of the vehicle on the planned route. The radar of t...
Embodiment 2
[0020] Example 2: It has the same technical solution as that of Embodiment 1, and more specifically: after planning the path of the drawing point, the vehicle continues to drive. Since the installation position of the driving recorder is fixed, the scene captured by the driving recorder represents the direction of the vehicle head, that is, the direction of the vehicle. . The driving recorder confirms the direction of travel, the driving lane, and the location of the target lane, and feeds back the image information to the host to correct the lane information on the grid map and confirm whether the coordinate points of the best path drawn are correct. First, there will be information on the number of lane lines in the background map information, that is, there are two (one-way) four (eight) lanes on the current driving road, and there will be corresponding lane lines; second, there will be the same number of lane lines in the vehicle grid map The lane line information is bui...
Embodiment 3
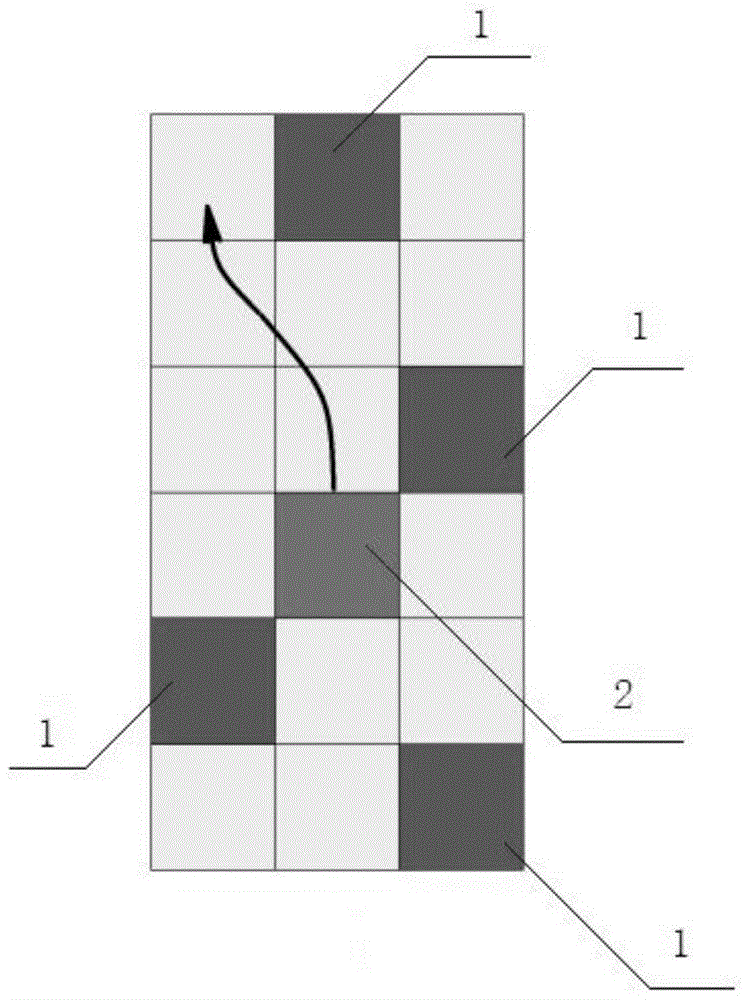
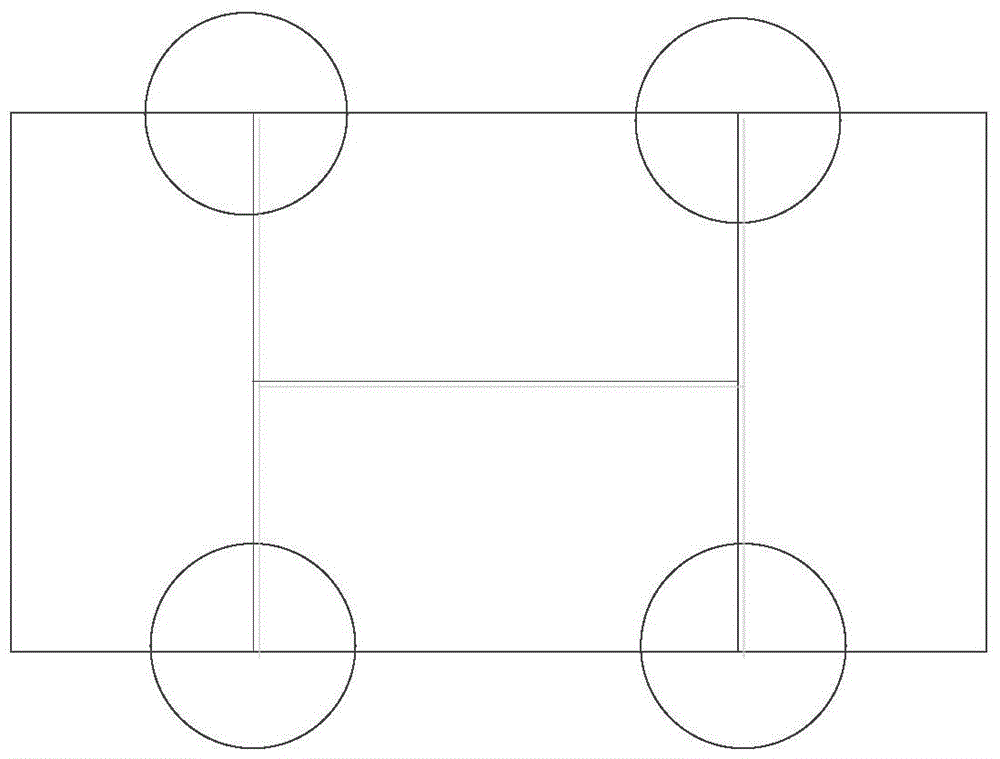
[0023] Embodiment 3: A driving path planning device, including a background map, a GPS positioning device, a radar, and a host; the background map plans a plurality of driving routes from the starting point to the ending point, and selects one of the driving routes; during driving, the GPS positioning device verifies the current driving route In order to plan the route; the radar of the vehicle detects the obstacles around the vehicle, and the detection data is input into the electronic control, and the electronic control inputs the coordinate information into the grid map, and plans the best route in the form of the grid map. There are a number of radars installed around the vehicle. The obstacles around the vehicle are detected by the radar. The detection data is input into the grid map with coordinate information. The grid map takes the midpoint of the line connecting the midpoints of the two axes as the origin. The axis is the line connecting the centers of the two opposi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More