

Multi-sensor passive synergic direction finding and positioning method
A multi-sensor, direction-finding positioning technology, which is applied in the field of high-precision passive cooperative direction-finding positioning of targets, can solve the problems of large difference in accuracy, decreased positioning accuracy of multiple passive sensors, and time asynchrony, etc., and achieves easy operation and realization, Improved effectiveness, improved processing quality results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing.
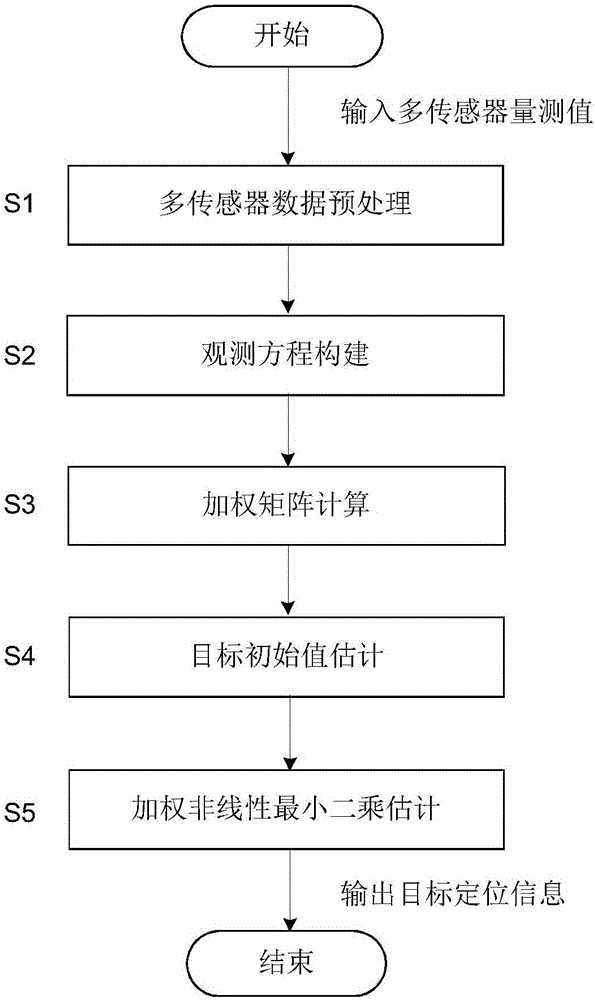
[0015] refer to figure 1 . In the embodiment described below, the entire process of the multi-sensor passive cooperative direction finding positioning method is automatically implemented in the cooperative positioning extension by using embedded software based on PowerPC. For this reason, according to the present invention, multi-sensor passive cooperative direction-finding positioning is constructed with multi-sensor data preprocessing module, observation equation construction module, weighted matrix calculation module, target initial value estimation module, and weighted nonlinear least squares estimation module. Software architecture; in the passive cooperative direction finding and positioning software, input multi-sensor measurement data, preprocess the multi-sensor data, calculate the prediction residual, and use the prediction residual to distinguish and eliminate o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More