

Horizontal visual angle estimation and calibration method based on depth camera
A technology of depth camera and horizontal viewing angle, applied in the field of eye tracking, which can solve the problems of inability to promote, inflexible operation, and large head restrictions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
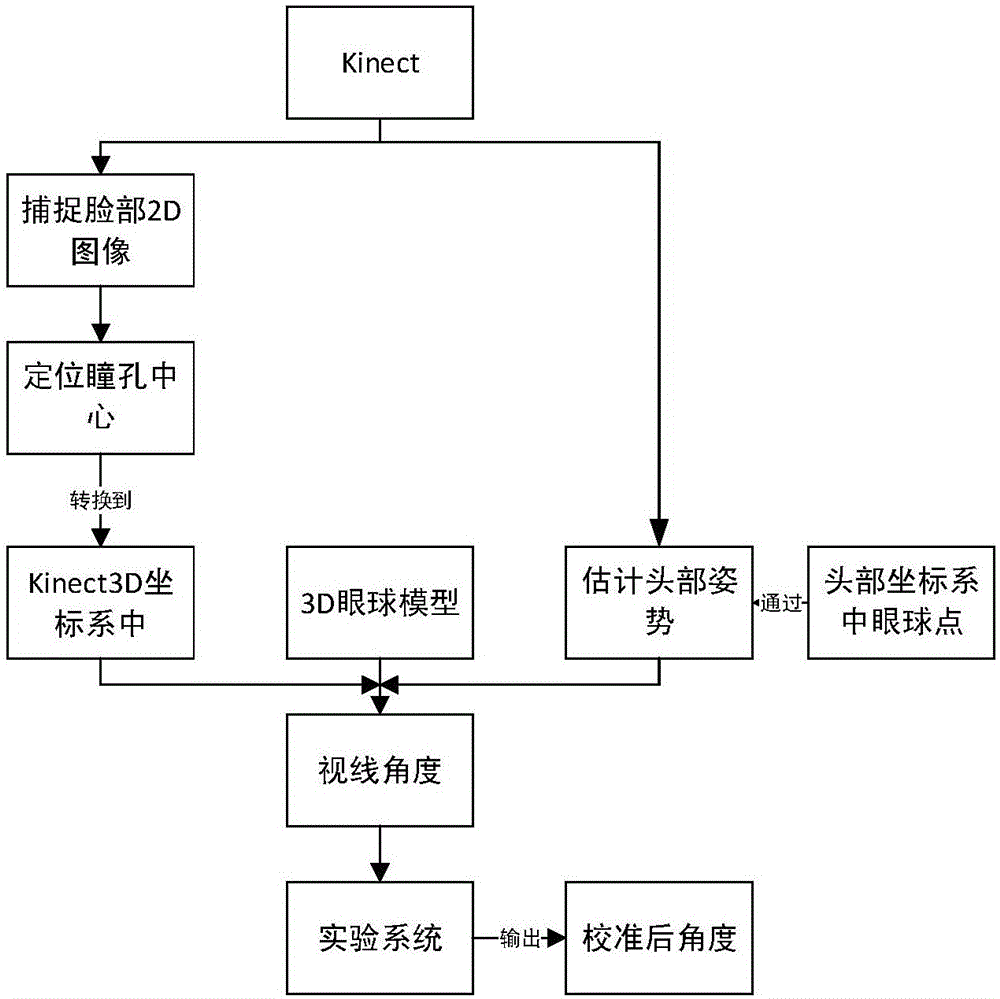
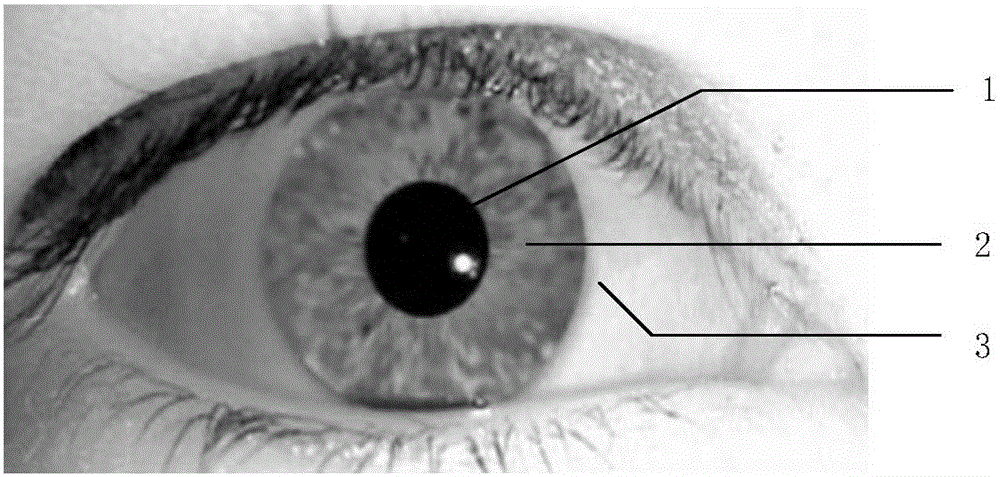
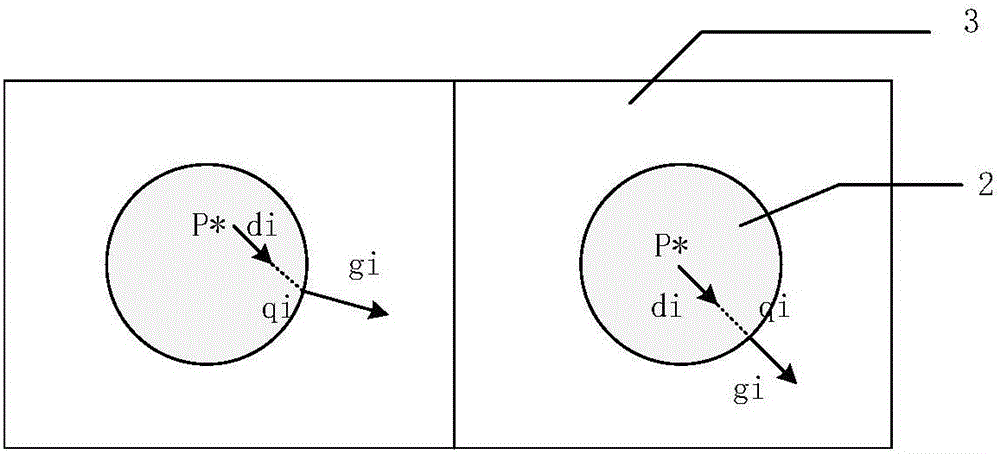
[0049] The present invention is based on the horizontal viewing angle estimation and calibration method of the depth camera 5. The method adopts the Kinect depth camera 5 to obtain the 3-dimensional coordinates of facial feature points, and uses a pupil 1 positioning algorithm, a 3D eyeball model and a preset eyeball center point. , to get the horizontal line-of-sight angle. The resulting line-of-sight angles are then calibrated through an experimental system.
[0050] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
[0051] Such as figure 1 Shown, is the flowchart of the inventive method, comprises the steps:
[0052] Step 1: Use the Kinect depth camera 5 to capture a 2D image of the face and estimate the head pose.
[0053] The present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More