Combined calibration method for multiple sensors of mobile robot
A mobile robot and multi-sensor technology, applied in the field of mobile robots, can solve problems such as unsatisfactory accuracy of calibration results, and achieve the effect of convenient calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0038] as attached figure 1 to attach Figure 5 Shown is a preferred embodiment of the present invention.
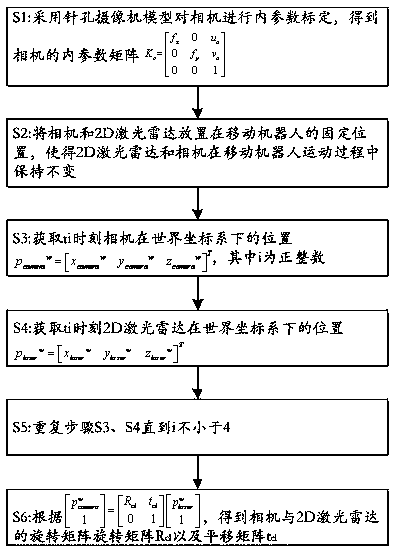
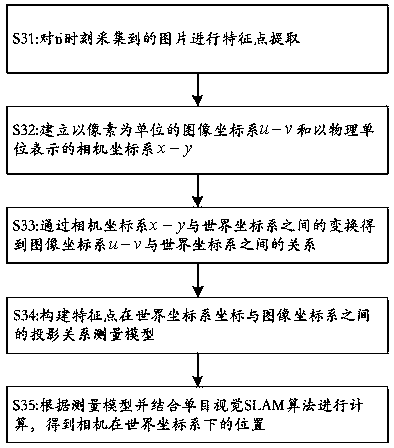
[0039] S1: Calibrate the internal parameters of the camera to obtain the internal parameter matrix of the camera ;
[0040] Using the pinhole camera model does not consider the lens distortion factor (the algorithm is relatively simple without considering the lens factor), and uses the traditional checkerboard table to calibrate the internal parameters of the camera to obtain the internal parameter matrix of the camera. Among them, is the focal length of the camera, is the optical center of the camera.
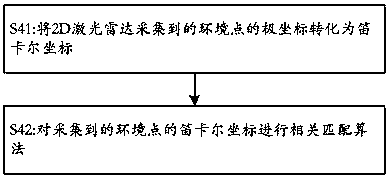
[0041] S2: Place the camera and 2D lidar at a fixed position on the mobile robot, so that the 2D lidar and camera remain unchanged during the movement of the mobile robot;
[0042] Due to the joint calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More