

Multifunctional stair cleaning robot with capacity of automatic adjustment
An automatic adjustment and robot technology, which is applied in the direction of cleaning machines, manual sweeping machines, manipulators, etc., can solve the problems of long time, low efficiency, bulky and other problems of moving and walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
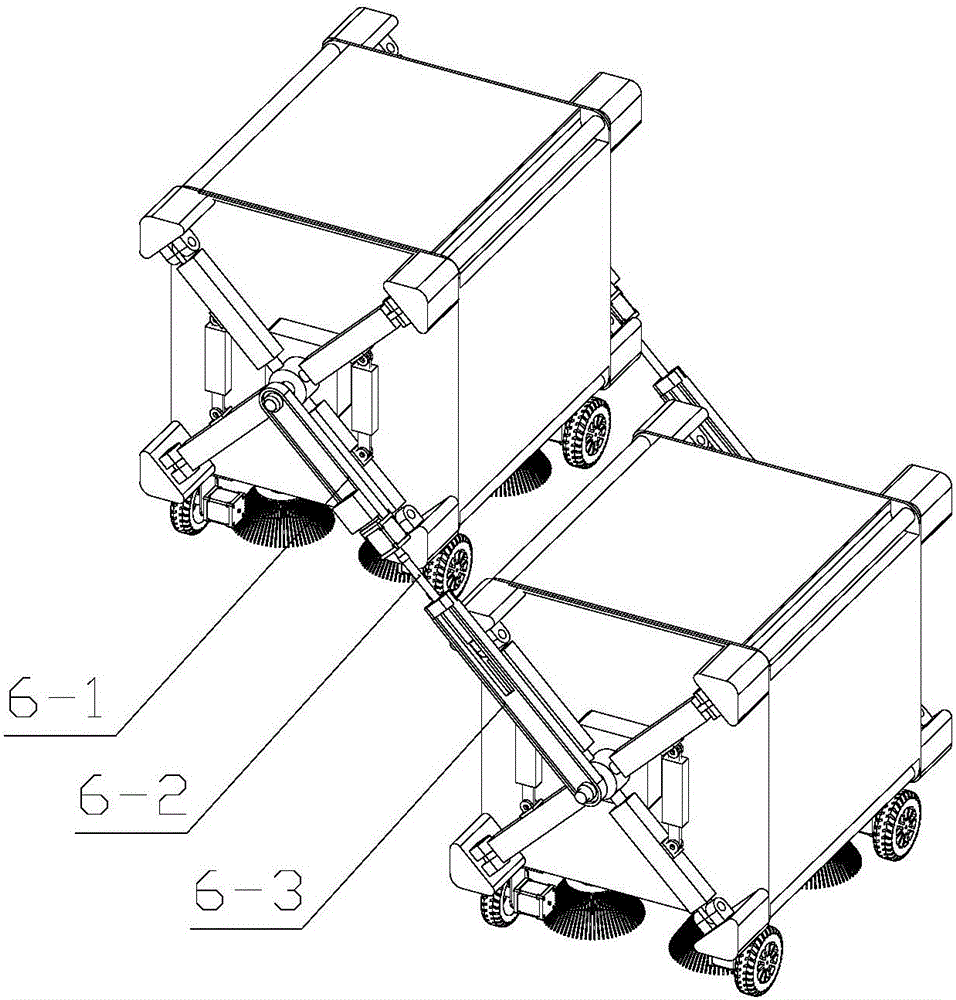
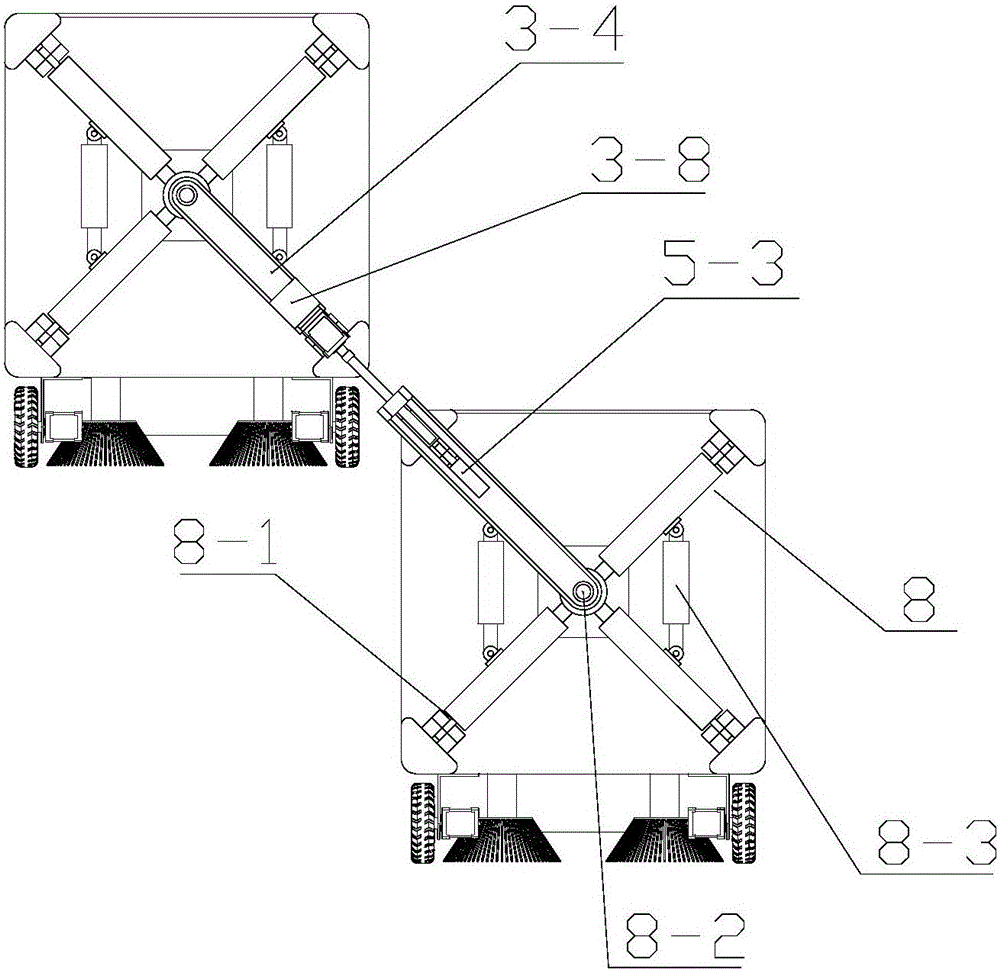
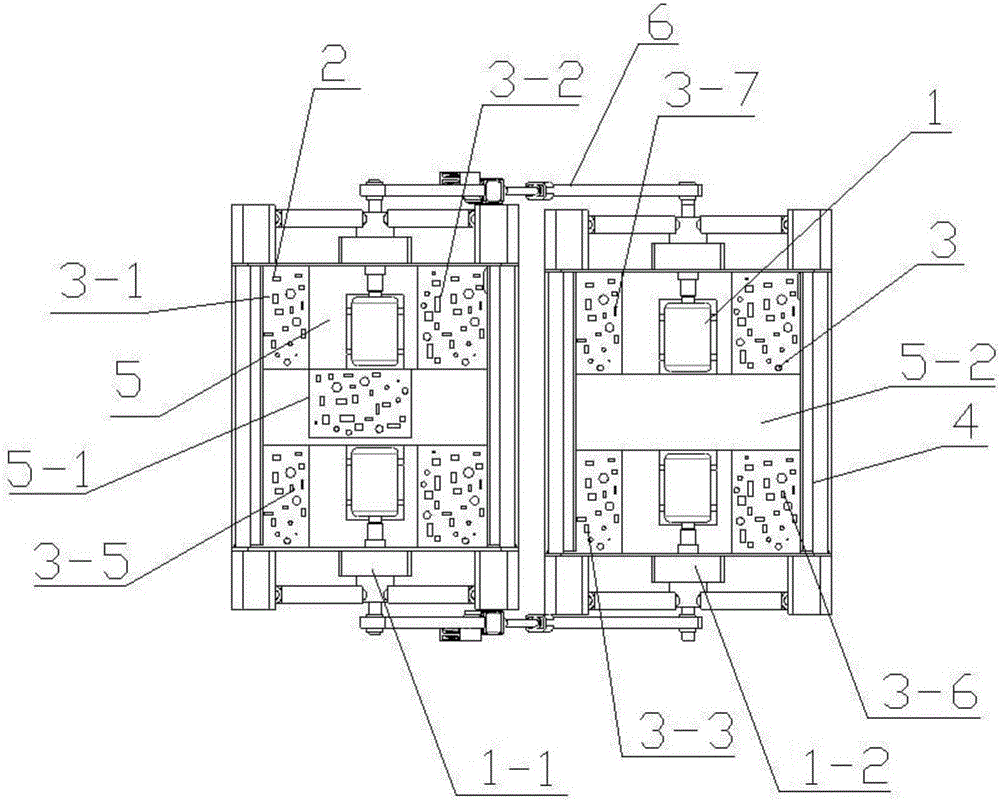
[0061] Such as Figure 1-6 shown. An intelligent wheel-axis alternating climbing robot includes: a base interleaving mechanism 1, a front base 2, an electric control mechanism 3, a rear base 4, a power supply system 5, a staggered axis telescopic mechanism 6, a cleaning mechanism 7, and a base telescopic mechanism 8. The base interleaving mechanism 1 includes: a front base swing mechanism 1-1, and a rear base swing mechanism 1-2. The front base swing mechanism 1-1 in the base interleaving mechanism 1 includes: a front base swing steering gear 1-1a, a front base reduction gear box 1-1b, and a front base rotating shaft 1-1c. The rear base swing mechanism 1-2 in the base interleaving mechanism 1 includes: a rear base swing steering gear 1-2a, a rear base reduction gear box 1-2b, and a rear base rotating shaft 1-2c. The electric control mechanism 3 includes: a first controller 3-1, a front base swing mechanism driver 3-2, a rear base swing mechanism driver 3-3, a base interleavi...
Embodiment 2
[0083] Such as Figure 1-6 shown. The present invention not only overcomes the shortcomings of the prior art stair-climbing robot and greatly improves the stair-climbing efficiency, but also provides a method for the robot to go up and down stairs matched with the mechanical mechanism of the present invention. details as follows:
[0084] Step 1: the first controller 3-1 controls the vacuum system 7-1 and the cleaning system 7-2 to clean up the garbage on the stairs where the front base 2 is located; at the same time, the second controller 3-7 controls the vacuum system 7- 1 and the cleaning system 7-2 realize the garbage cleaning work on the stairs where the rear base 4 is located. When the robot climbs the stairs: the first controller 3-1 transmits a signal through the ZigBee module 3-5 of the front base, communicates and fuses information through the ZigBee module 3-6 of the rear base and the ZigBee module 3-8 of the interleaving mechanism of the base.
[0085] Step 2: T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More