

Track planning and control method of free curve of industrial robot based on double quaternions
A technology of industrial robots and control methods, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., and can solve the problems of Euler angle universal deadlock, the inability to determine the rotation axis by the equivalent axis method, and a large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
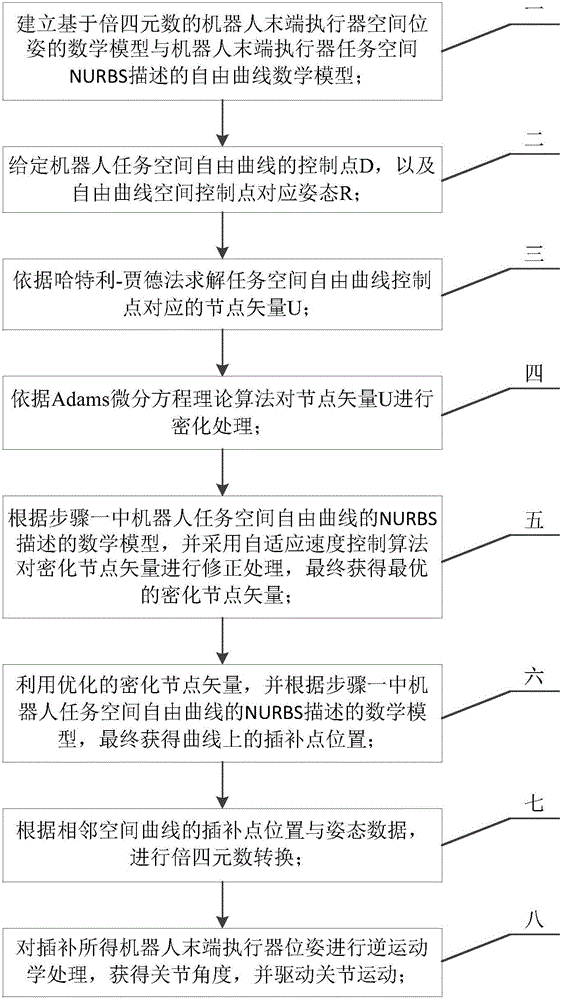
[0077] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present invention.
[0078] The concept of free curve is proposed to describe more complex geometric shapes in order to improve the processing efficiency and precision of industrial robots. The Non-Uniform Rational B-Spline (NURBS, Non-Uniform Rational B-Spline) curve can accurately see the distribution characteristics of the control points of the curve shape, and can effectively solve the shortcoming that the value points cannot be evenly distributed.
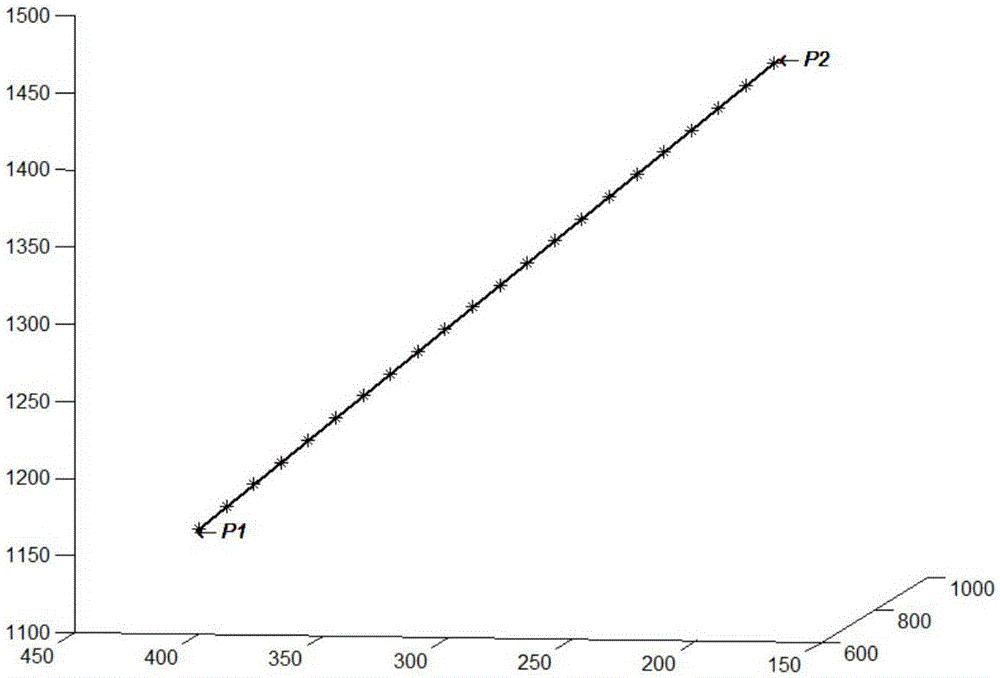
[0079] Quaternion is a new mathematical modeling tool based on Clifford algebra, which is developed on the basis of quaternion. The position and attitude in Cartesian space can be converted to four-dimensional space by using double quaternion, which can not only e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More