

Master-slave intervention operation robot slave side operating device and control method thereof
An interventional surgery and operating device technology, which is applied in the field of minimally invasive vascular interventional surgery robot and its control, master-slave minimally invasive vascular interventional surgery robot slave-end operating device field, can solve the problem of complicated guide wire assembly and disassembly, difficult guide wire pushing, and improved performance. Difficulty and other problems, to avoid randomness and uncontrollability, increase surgical safety, and solve the effect of pushing difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings of the description.
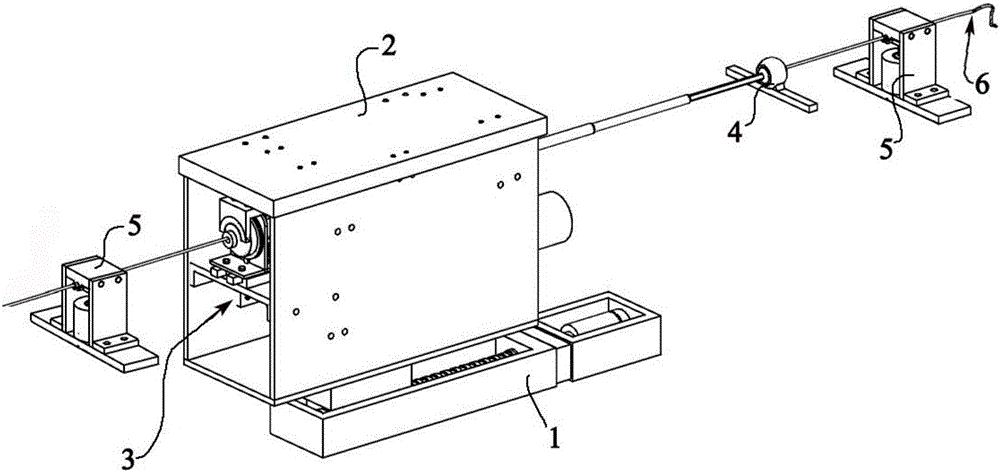
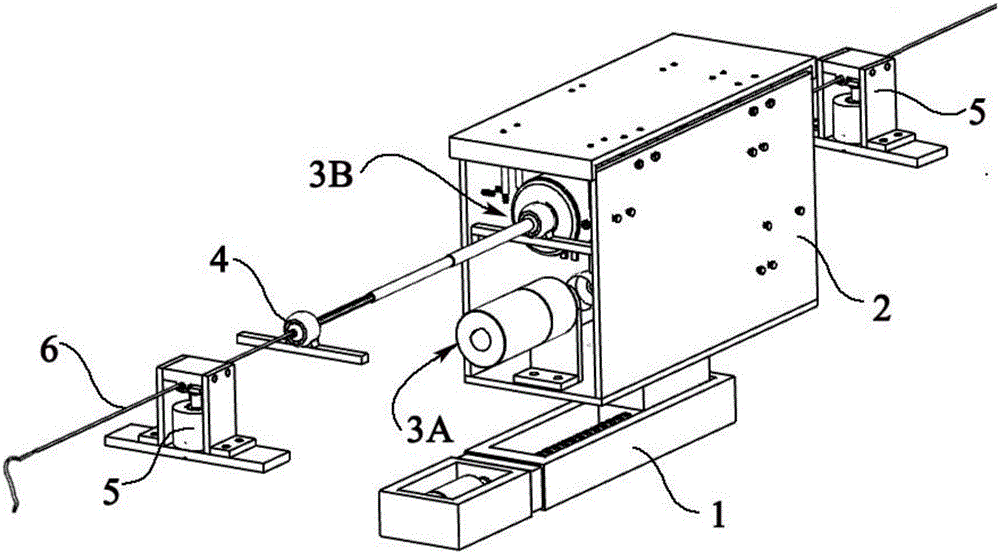
[0062] like Figure 1-9 As shown, a master-slave interventional surgery robot slave end operation device includes a mobile platform 1, a housing 2, a body 3, a telescoping mechanism 4, a locking switching mechanism 5, and a guide wire 6. The housing 2 is installed on a mobile On the base 1-1 of the platform 1, the body 3 is assembled in the housing 2, one end of the telescopic mechanism 4 is fixedly connected with the housing 2, and the other end is fixedly connected with the operating table, and the locking switching mechanism The number of 5 is 2, which are respectively arranged on the outside of the housing 2 and the telescopic mechanism 4. The guide wire 6 passes through the lock switching mechanism 5, the housing 2, the body 3, and the telescopic mechanism 4 sequentially in the direction of operation feed. and lock switching mechanism 5,
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More