

Grabbing manipulator capable of turning over box body
A technology for grasping manipulators and boxes, applied in manipulators, program-controlled manipulators, chucks, etc., to achieve the effects of high mechanical strength, expanded range and strong working stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
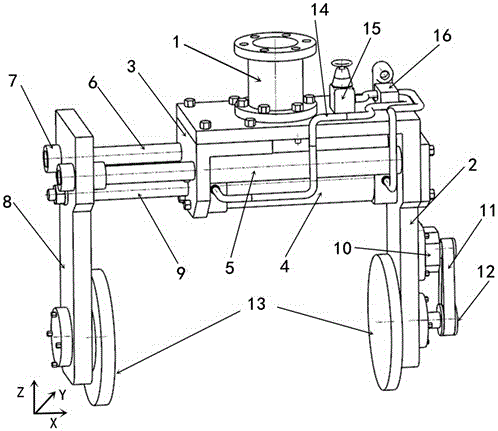
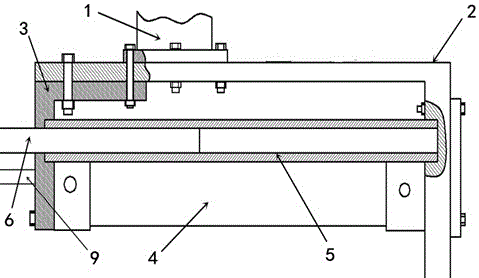
[0017] Embodiment 1: A grabbing manipulator for a reversible box is installed at the end of a rotating manipulator of a Cartesian robot. The Cartesian robot controls the manipulator to reach the specified grabbing position and grabbing angle by moving along the X-axis, Y-axis, and Z-axis and rotating around the Z-axis. The electromagnetic control reversing valve controls the air pressure rod through the air cylinder to drive the movable splint to do horizontal reciprocating movement, which can adjust the clamping width of the manipulator. The movable splint is connected with the guide rod through the sleeve, the guide rod slides in the guide sleeve, and the guide rod and the guide sleeve play the role of guide rail and support. Two pairs of guide rods and guide sleeves are parallel to each other. The sleeve is symmetrically extended and installed on the movable splint, and the sleeve and the guide rod are shrunk fit together to increase the contact area and strengthen the con...
specific Embodiment approach 2
[0019] Specific implementation mode 2: Cartesian coordinate robot controls the manipulator to move to the preset grabbing position, and the mechanical arm rotates at a certain angle, so that the gripping surfaces of the two gripping discs are in contact with the two symmetrical surfaces of the box for gripping. Cartesian coordinates The robot then adjusts the height of the manipulator, moves to the designated position and places it. The work of the pneumatic control circuit is to complete the grabbing and placing of the box body according to the specific embodiment one.
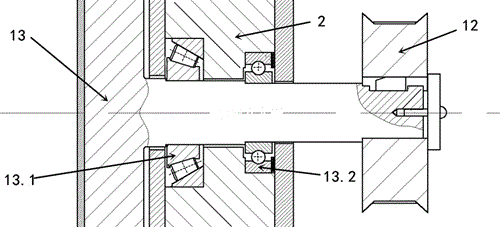
[0020] The active gripping disc is mounted on the fixed clamping plate with a tapered roller bearing and a deep groove ball bearing. The tapered roller bearing offsets the axial force generated by the clamping disc, and the deep groove ball bearing offsets the radial force generated by the clamping disc. This structure makes the structure of the manipulator more compact. The bearing is fixed with the fixed s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More