Robot flexible controller for complex CPS (Cyber Physical System) and implementation method thereof
A robot and controller technology, applied in the field of intelligent manufacturing control, to achieve the effect of promoting use, increasing flexibility, and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
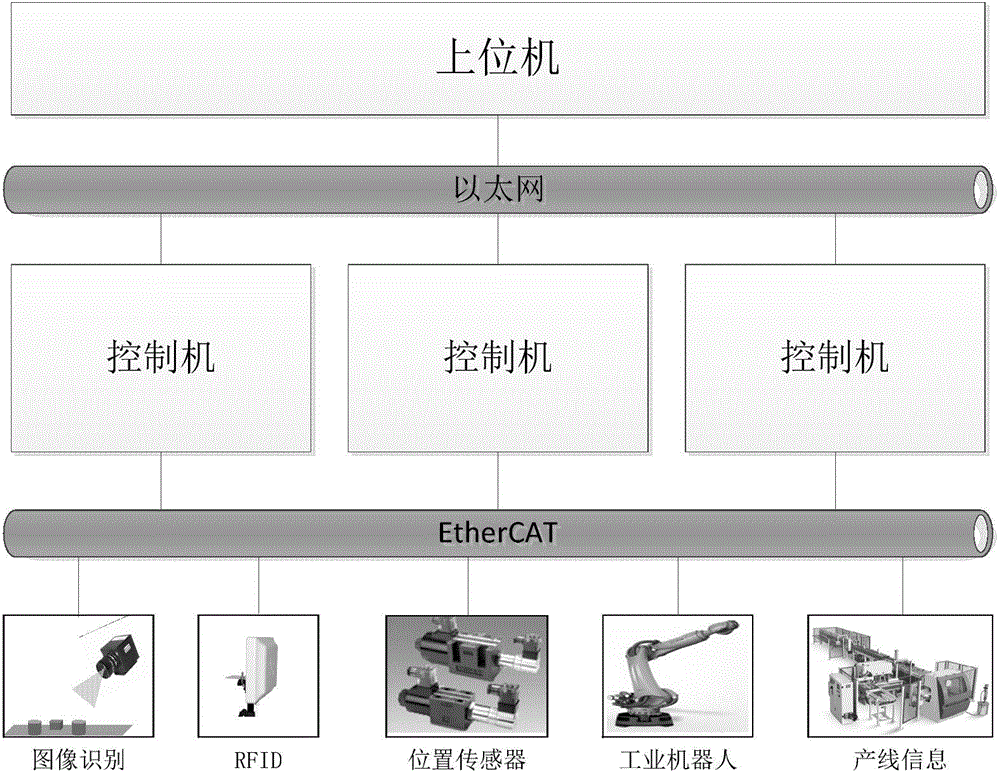
[0033] see figure 1 , a robot flexible controller used in a complex cyber-physical fusion system, which mainly involves: the upper computer and the control computer.
[0034] The upper computer is a common PC platform running a Windows operating system, and a simulation environment based on Matlab software is constructed. The engine provided by Matlab can be used to develop a custom integrated environment based on C language. Third-party software programs that support Matlab / Simulink development can also be used. The upper computer is connected with the control computer through Ethernet.
[0035] The control machine is based on the X86 architecture platform of the QNX real-time operating system, supports the EtherCAT bus protocol, and provides a simulation environment that can run Matlab real-time codes for the upper computer. The control m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com