

Service robot optimal path program method based on heuristic function
A technology for optimal path planning and service robots, applied in data processing applications, forecasting, computing, etc., can solve problems such as poor accuracy and low efficiency, and achieve the effect of reducing search space, narrowing search space, and avoiding repeated visits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
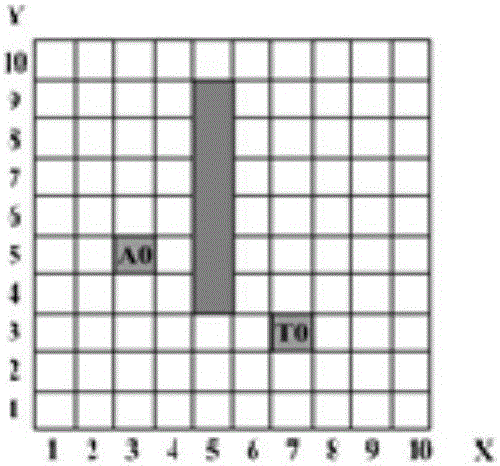
[0046] The path planning method of the present invention will be further described below in conjunction with the accompanying drawings.
[0047] The present invention adopts the A-Star algorithm of the improved heuristic function
[0048] Considering the complexity of the actual map environment, the heuristic function used in the present invention includes two factors of direction and distance:
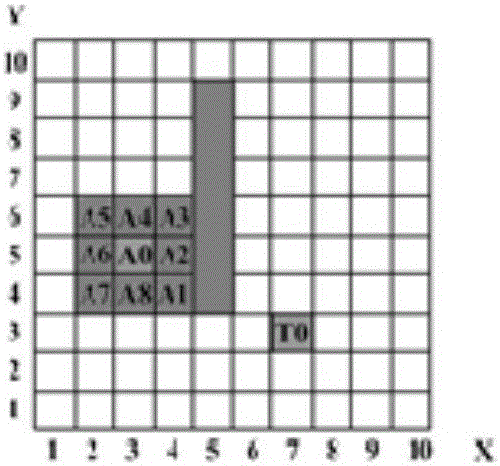
[0049] H ~ ( n ) = α 1 · θ + α 2 · D
[0050] D=max(|n(x)-goal(x)|,|n(y)-goal(y)|)
[0051] In the formula, α 1 is the direction heuristic factor, which determines the weight of the direction information; θ is the angle between the vector formed by the candidate node and the starting point and the vector formed by the end point and the starting point, which reflects ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More