

Automobile lane change collision avoidance control method
A control method and technology for automobiles, applied to control devices, vehicle components, input parameters of external conditions, etc., can solve problems such as malfunctions, false alarms, people and vehicles cannot be accurately identified, and achieve high real-time performance and data processing. small amount of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings.
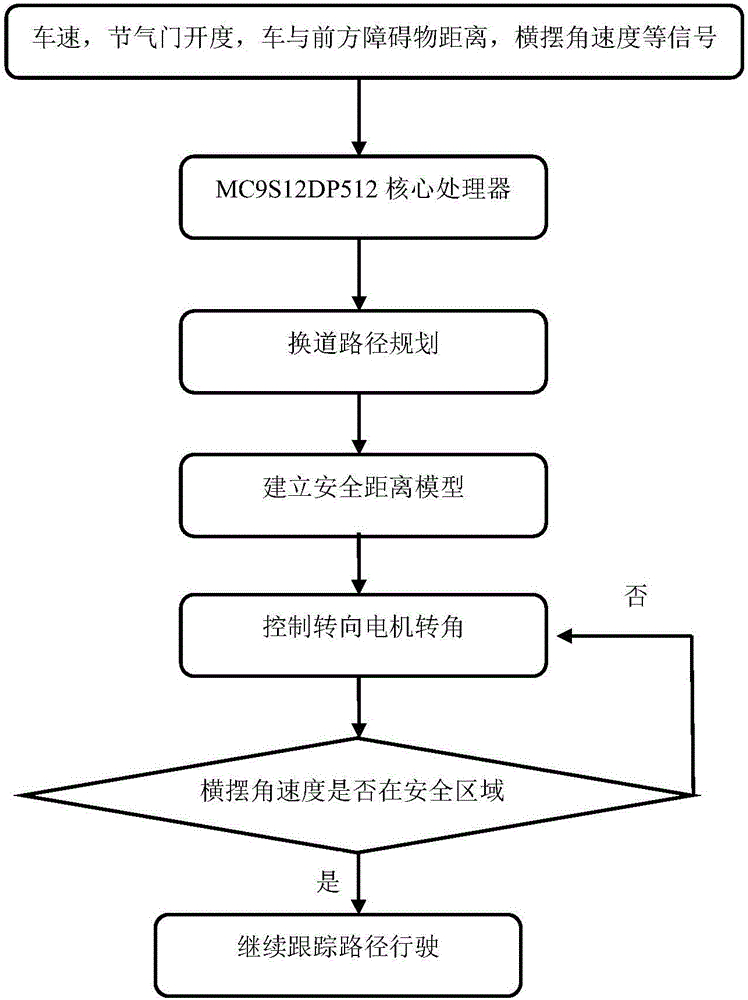
[0025] Such as figure 1 Shown, a kind of vehicle lane change collision avoidance control method of the present invention, concrete process is as follows:
[0026] Step 1. The millimeter radar on the car measures the distance S to the vehicle or obstacle in front, the wheel speed sensor measures the vehicle speed U, the throttle position sensor detects the current throttle opening, and the brake pedal position sensor detects the braking force , the steering wheel angle sensor detects the angle signal, the yaw rate sensor detects the yaw rate signal, and inputs these signals into the Freescale series MC9S12DP512 microcontroller;
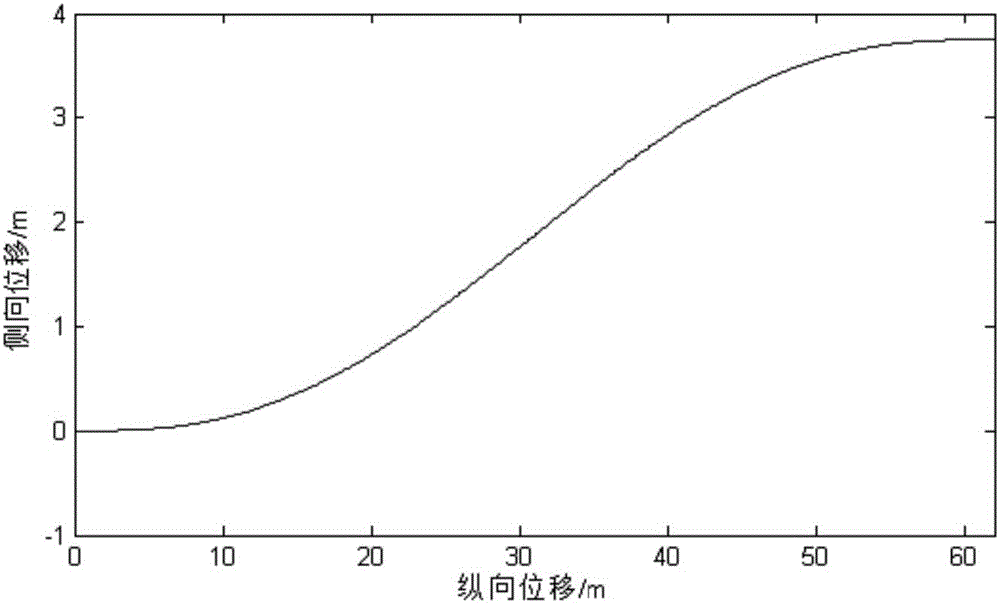
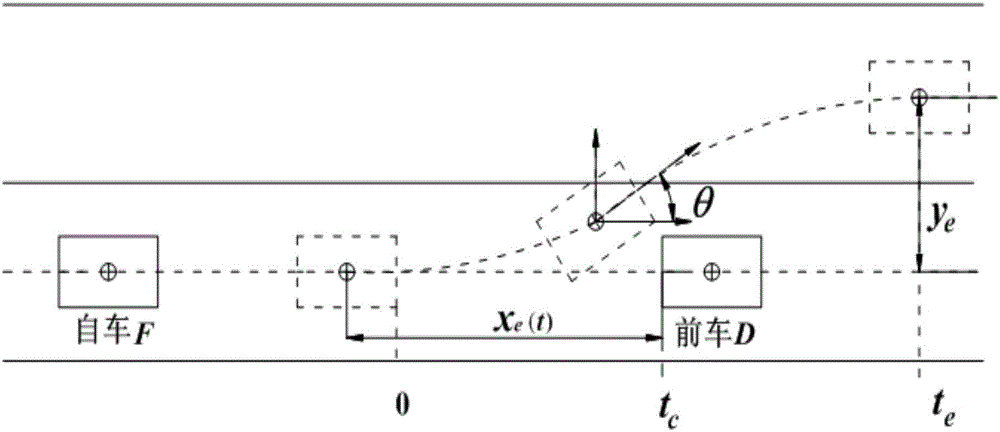
[0027] Step 2. The single-chip microcomputer plans a reasonable path y according to the external environment and its own vehicle speed and other signals:
[0028] y(x)=a 0 +a 1 x+a 2 x 2 +…+a n x n
[0029] Set the highest po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More