

Discrete repetition control method for motor servo system
A servo system and repetitive control technology, applied in the direction of electric controllers, controllers with discontinuous output signals, etc., can solve the problems of increasing internal model order and reducing system control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
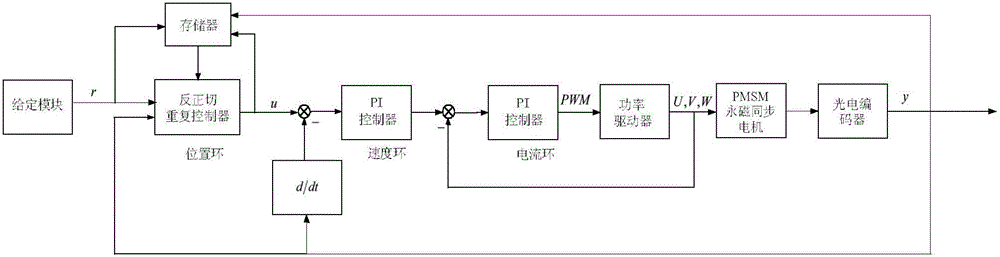
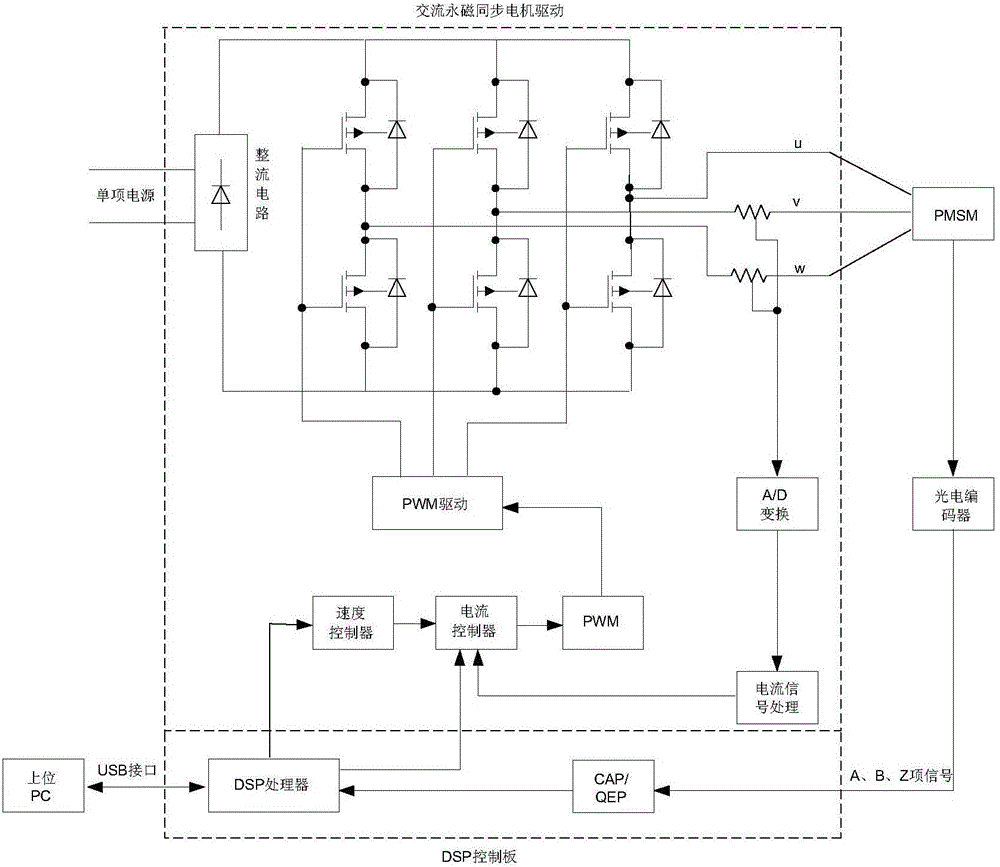
[0171] Embodiment: In this embodiment, the permanent magnet synchronous motor servo system performs repeated tracking tasks on a fixed interval as an example. Its position reference signal has a periodic symmetric characteristic. The servo motor adopts three-loop control, wherein the current loop and speed loop controllers are controlled by The ELMO driver is provided; the position loop controller is provided by the DSP development board TMS320F2812.
[0172] To design a position loop controller, it is necessary to establish a mathematical model of the servo objects other than the position loop, including the current loop, speed loop, power driver, AC permanent magnet synchronous servo motor body and detection device (see figure 2 ). The mathematical model of the servo object obtained through parameter estimation is
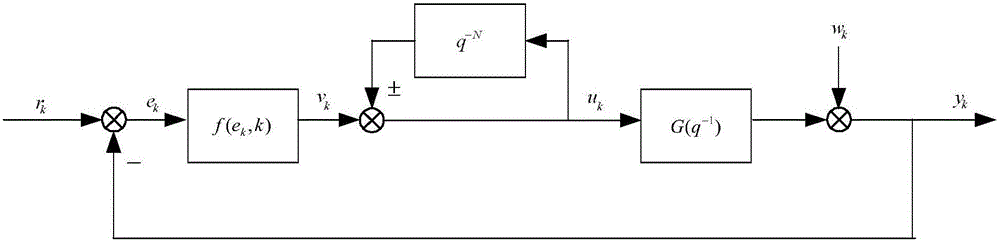
[0173] the y k+1 -1.5001y k +0.4989y k-1 =2.87856u k -0.4113u k-1 +w k+1 (twenty three)
[0174] Among them, y k , u k Respectively, the position out...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More