

Magnetic force micro robot with multiple cilia, and manufacturing method and control system of magnetic force micro robot
A technology of micro-robot and manufacturing method, applied in manufacturing tools, micro-manipulators, manipulators, etc., can solve the problems of insufficient tail flexibility and lack of motion performance, and achieve the effects of control and drive signal optimization, simple structure, and convenient control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to enable those skilled in the art to better understand the technical solutions in the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
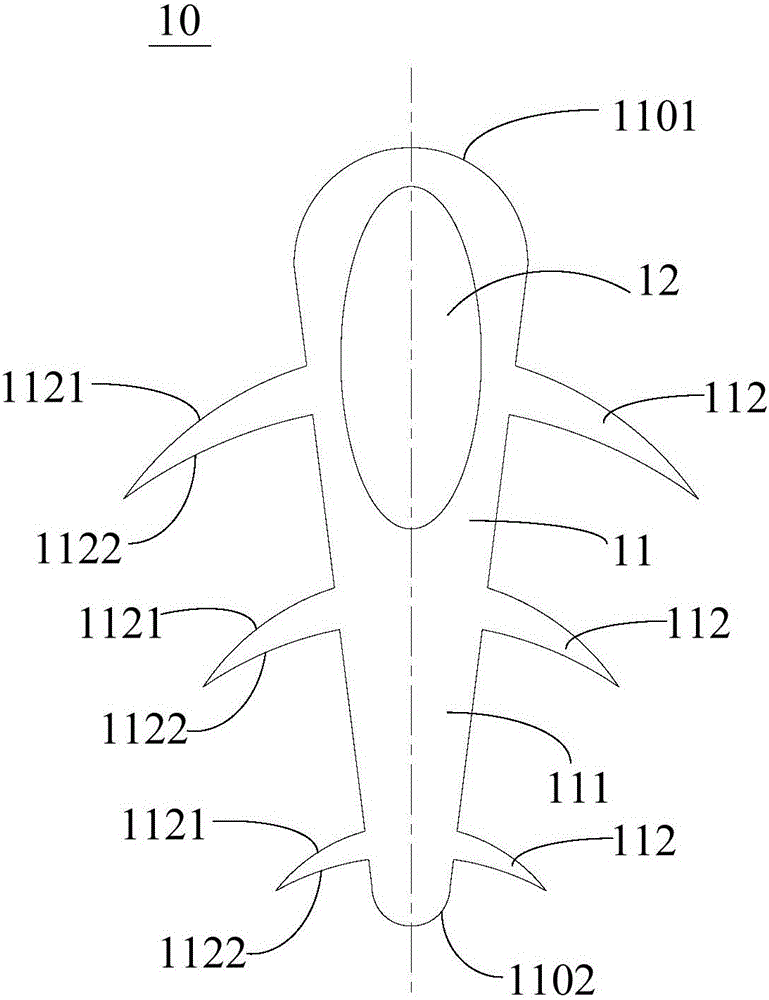
[0043] ginseng figure 1 As shown, a multi-cilia magnetic micro-robot 10 in a specific embodiment of the present invention includes a micro-robot base 11 and a magnetic drive module 12 located on the micro-robot base. The micro-robot base 11 includes a main body 111 and two A number of ciliary structures 112 arranged symmetrically on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More