

Automatic work system, and automatic walking device and steering method thereof
A technology of automatic walking equipment and working range, applied in control/regulation systems, motor vehicles, non-electric variable control, etc., can solve problems such as unreasonable judgment, low work efficiency, and inability to know the exact position of the original walking direction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0137] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
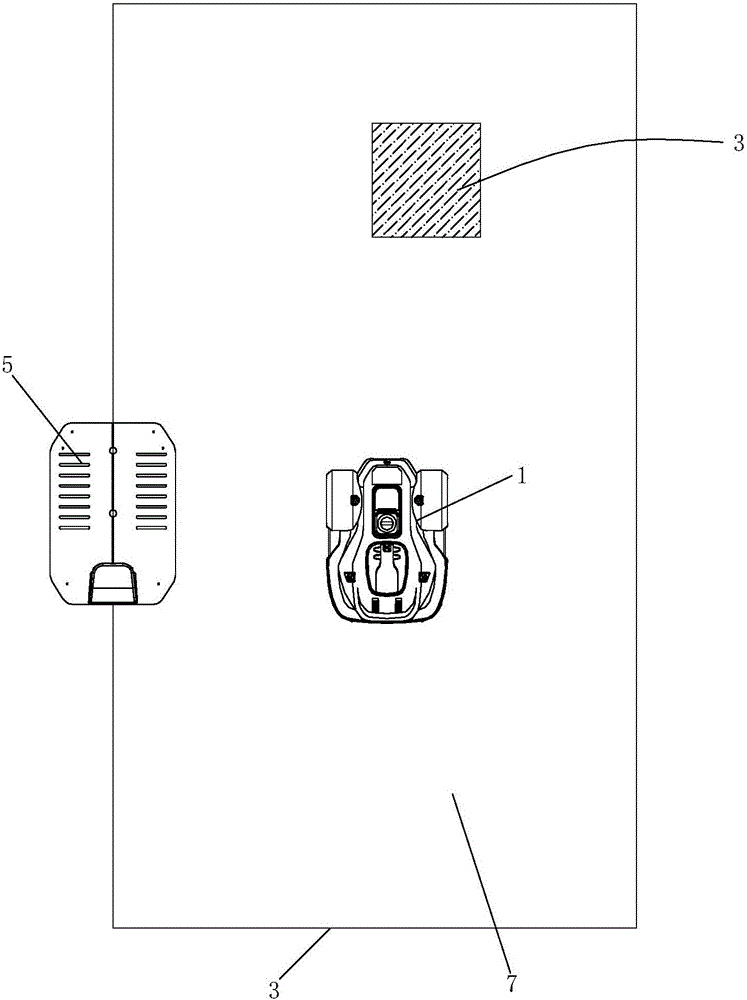
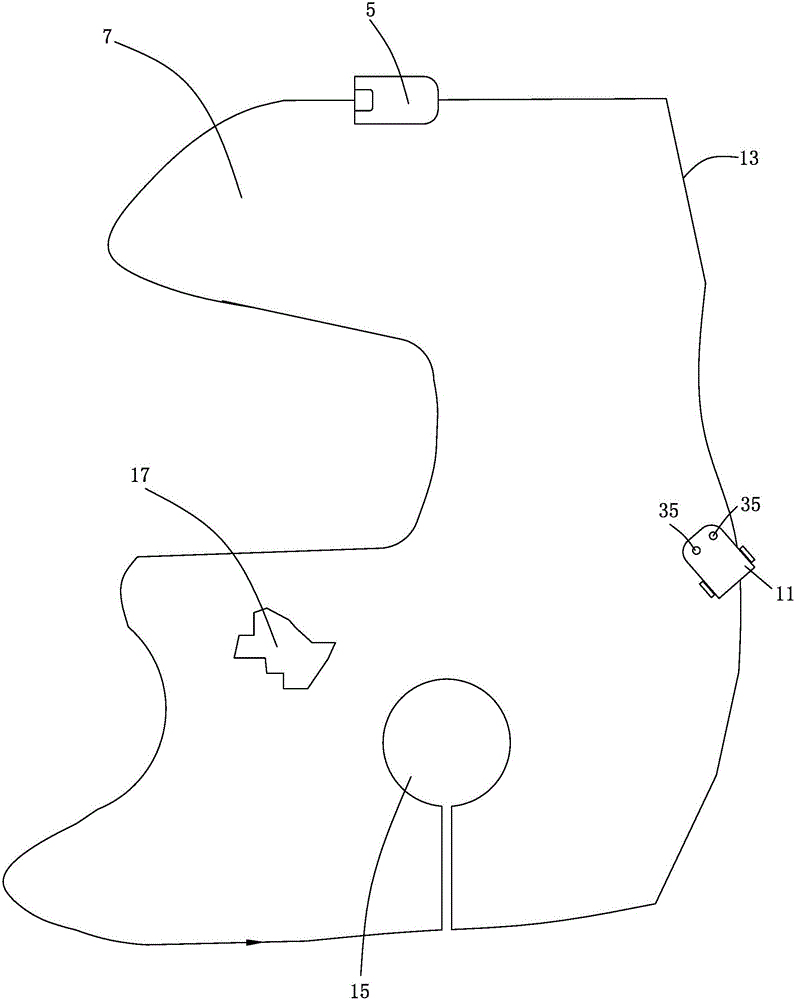
[0138] like figure 1 , The automatic working system of this specific embodiment includes an automatic running device 1 , a boundary line 3 and a stop 5 . Wherein the limit 3 is used to limit the working area 7 of the automatic working system, the automatic running equipment walks and works in or between the boundaries, and the docking station is used for parking the automatic running equipment, especially returning to replenish energy when the energy is insufficient.
[0139] Boundary is a general term for boundaries and barriers. The boundary is the periphery of the entire work area, usually connected end to end, and closes the work area. The boundary can be physical or electronic, that is, the boundary can be formed by walls, fences, railings, etc., or a virtual boundary can be sent by a boundary signal generator Signals, such as electroma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More