

Semi-automatic cooperative skeleton machine
A machine device and semi-automatic technology, applied in the field of skeletal robots, can solve the problems of less handling design, complex structure, high production cost, etc., and achieve the effects of reasonable structural design, convenient program setting, intelligent control and convenient program setting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
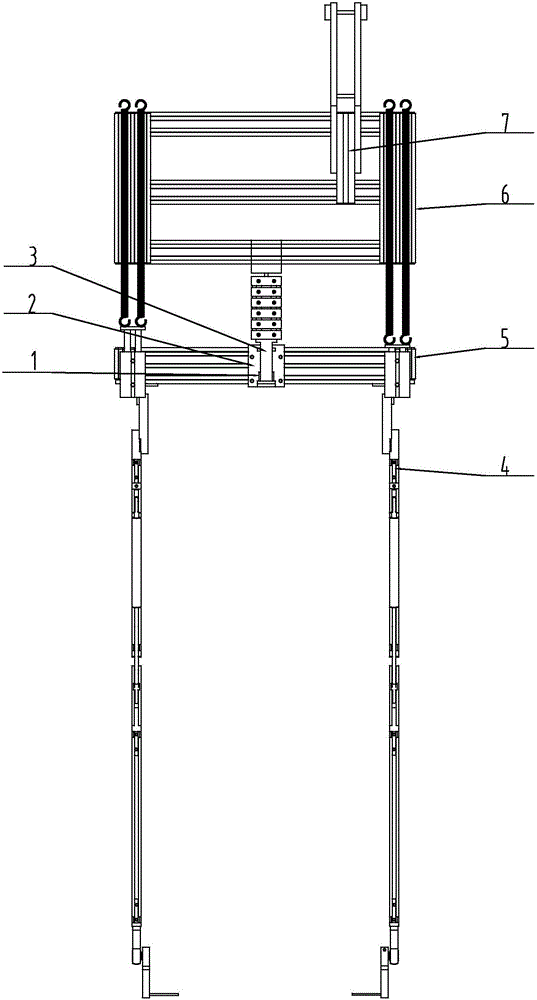
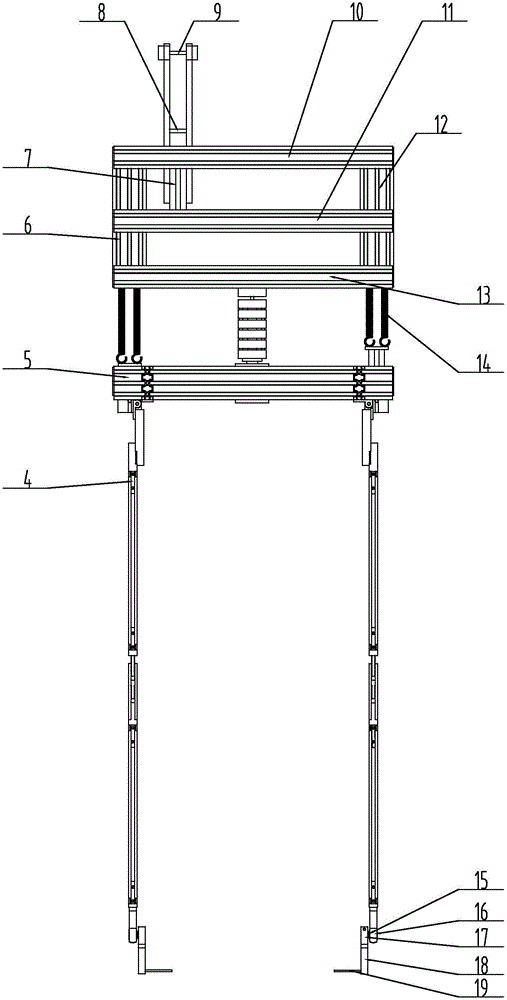
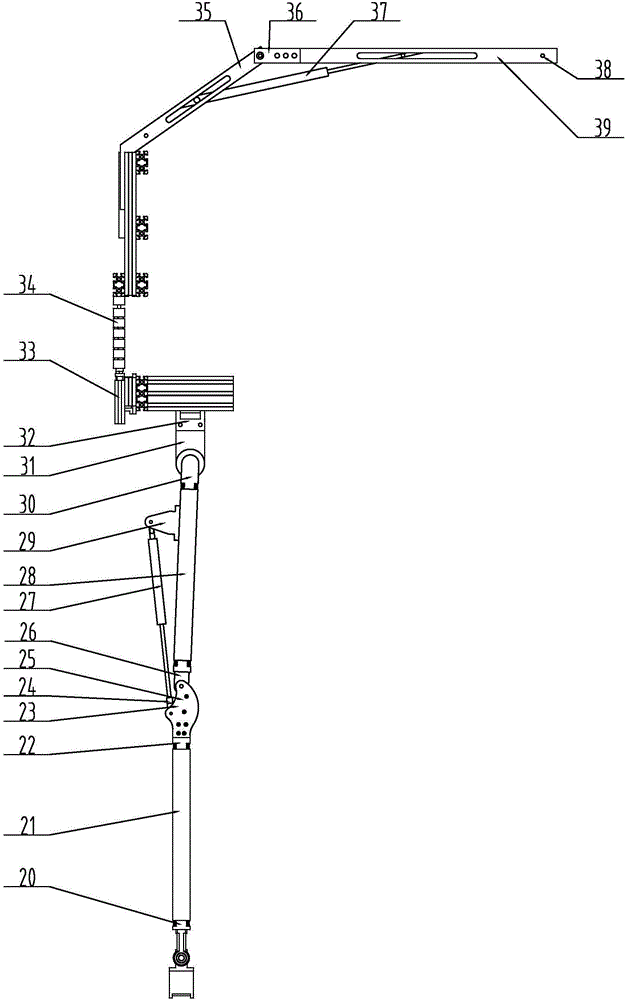
[0021] Now in conjunction with the accompanying drawings, the structure and working principle of the present invention will be further described. Such as Figure 1-Figure 6As shown, the skeletal machine device includes a lower extremity exoskeleton walking aid machine and an upper extremity exoskeleton walking aid machine, as well as corresponding wrapping boards and straps. Controllers, compressors and mounts. The upper extremity exoskeleton walking aid machine includes a connecting slider 1, a waist connecting part 2, a slider bracket connecting part 3, a waist horizontal plate 5, a first vertical back plate 6, a boom support block 7, a lateral stabilizing shaft 8, and a rotating shaft 9 , the upper horizontal board 10, the middle horizontal board 11, the second vertical back board 12, the lower horizontal board 13, the bionic spine 34, the boom rear beam 35, the boom middle beam 36, the boom cylinder 37, the horizontal mounting shaft 38, the suspension Arm front beam 39, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More