

Vehicle environment perceiving and controlling method based on cloud machine learning
A machine learning, vehicle environment technology, applied in the field of vehicle environment perception and control using cloud big data learning, can solve the problem that control parameters cannot be updated in time, short detection distance environment perception parameters, environmental perception accuracy and vehicle control accuracy is insufficient, etc. problems, to achieve the effect of improving accuracy and vehicle control accuracy, improving performance, and improving ranging distance and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
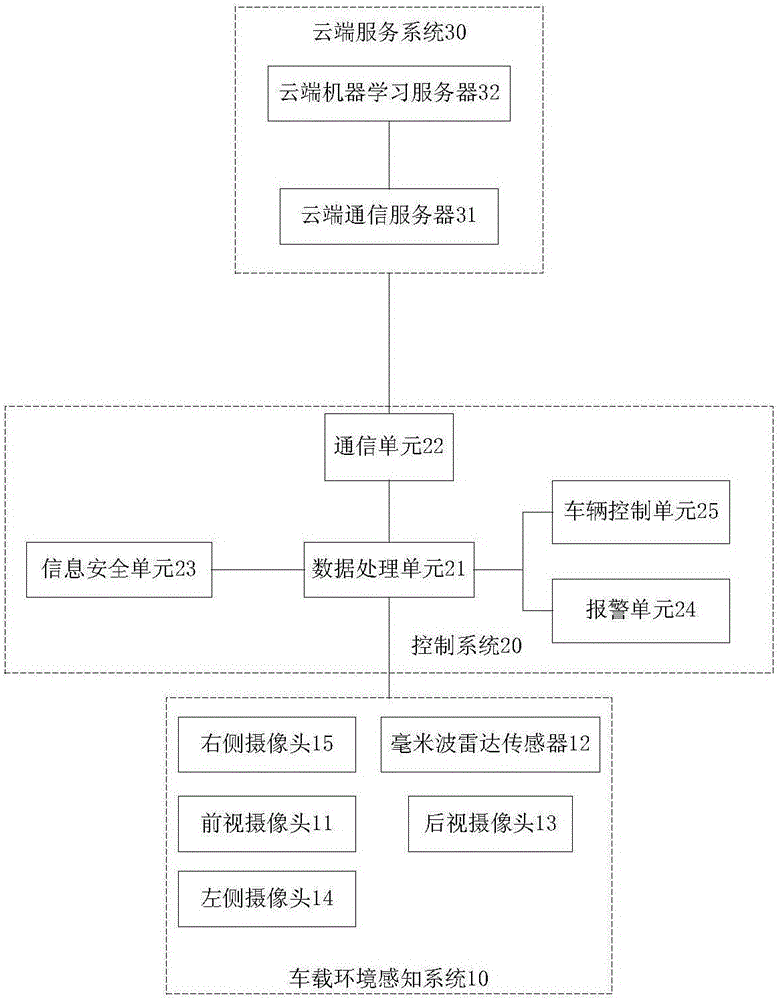
[0029] As a new type of data computing and storage mode, big data computing based on cloud architecture has the characteristics of stronger big data processing capabilities, larger storage space, elastic scalability and transparency to users, and has become a problem in dealing with large-scale data. important tool. Through big data computing services, a large number of local computing operations of users can be completed with the help of computing power of cloud servers. Such a computing service model can effectively reduce the client's requirements for large-scale computing capabilities. Therefore, the present invention proposes a vehicle environment perception and control method based on cloud machine learning.
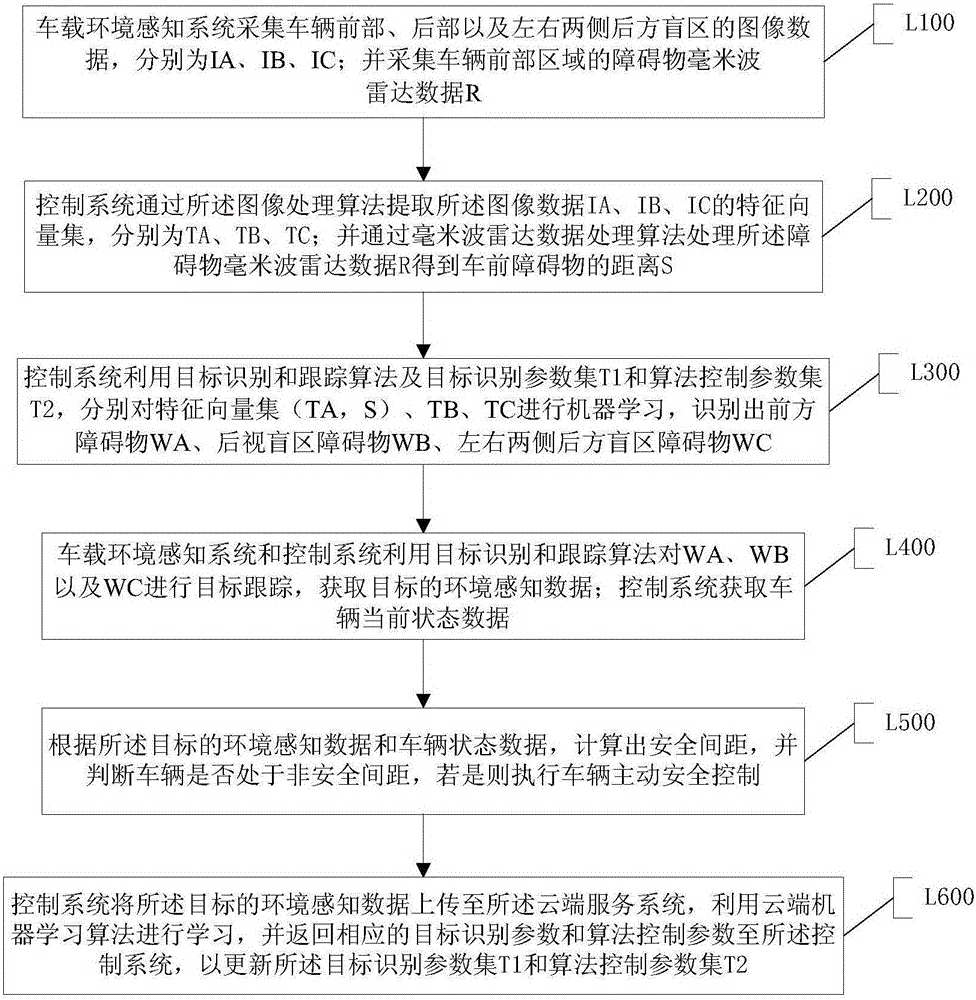
[0030] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0031] see figure 1 and figure 2 , a cloud-based machine learnin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More