

Route planning grid space partitioning method for unmanned aerial vehicle
A technology for unmanned aerial vehicle and track planning, which is applied to navigation computing tools and other directions, can solve the problem that track planning cannot meet the requirements of maneuvering constraints, etc., and achieves the effect of saving smooth processing steps, simplifying processes, and saving the consumption of computing resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0076] Example 1: For a small unmanned aerial vehicle flying at an altitude of 500 meters, the grid space division for trajectory planning is performed
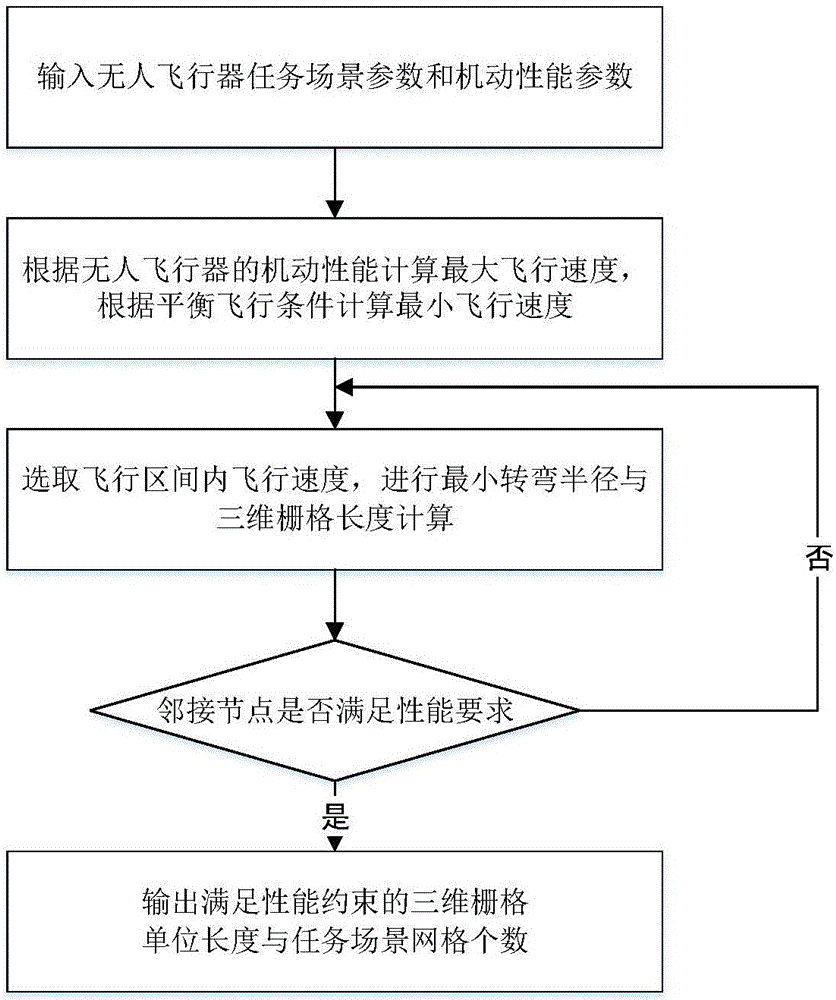
[0077] Step 1: Parameter input
[0078] (a) Input the flight altitude H=500m when the unmanned aerial vehicle performs the mission, and the highest terrain height H of the mission scene M =800m;
[0079] (b) Input and UAV parameters, such as UAV reference aerodynamic area S ref =0.5m 2 , UAV head curvature radius R d =0.6m;
[0080] (c) Input the maneuvering parameters of the unmanned aerial vehicle during flight, such as the minimum angle of attack α min =1°, the maximum roll angle φ max =85°, maximum overload n max = 4, maximum normal overload n zmax = 2, coefficient C of overload empirical formula Lα = 2, C D0 =0.055, C Dα =2.5, the maximum aerodynamic pressure q max =5×10 5 Pa and heat flux Q at the maximum stagnation point max =2×10 6 kW / m 2 .
[0081] Step 2: Calculate Safe Flight Speed Corridor
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More