

A flexible leg structure of a planar five-bar mechanism
A five-bar mechanism and flexible leg technology, which is applied in the field of the flexible leg structure of a plane five-bar mechanism, can solve the problems of poor load-carrying capacity of the series mechanism, reduced reliability and durability of parts, and damage of four-legged robot parts, etc. The effect of environmental adaptability, fast motion response, and superior dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiment is a specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes, but it is not used as a limitation to the scope of protection of the claims of the present application.
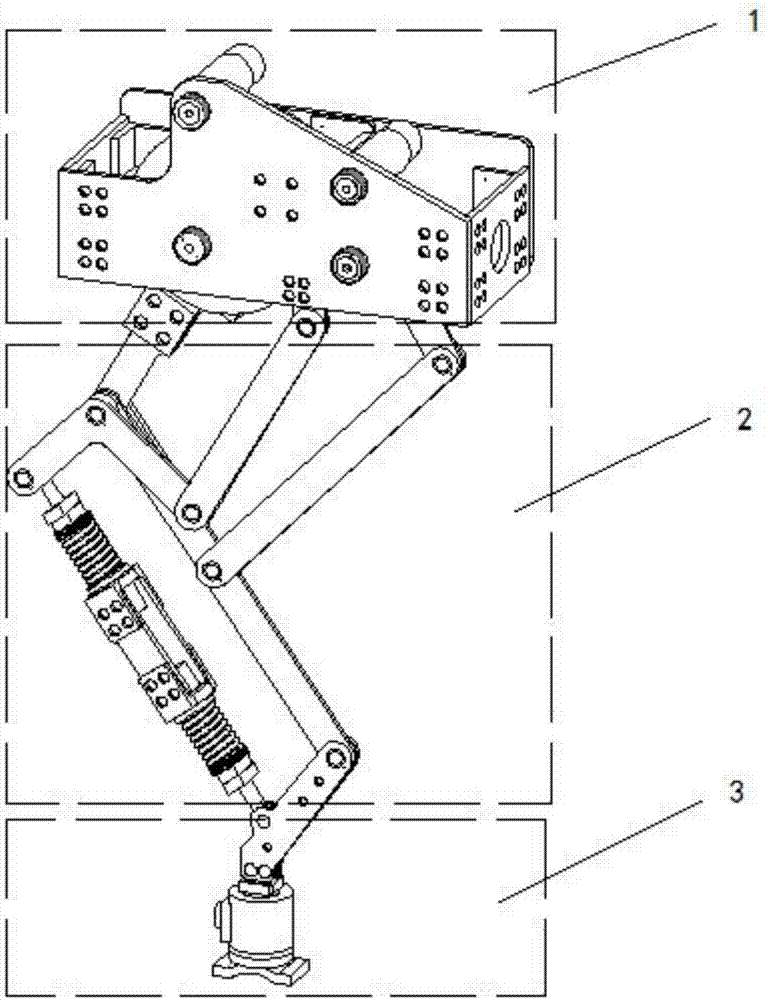
[0025] The flexible leg structure of the planar five-bar mechanism designed by the present invention (be called for short leg structure, refer to Figure 1-8 ) includes three large modules (three major parts): pitch drive joint module (referred to as pitch motion joint) 1, link structure module (referred to as link structure) 2 and toe module (referred to as toe) 3; pitch motion joint module 1 above the linkage module 2 and the toe module 3 below the linkage (see figure 1 );
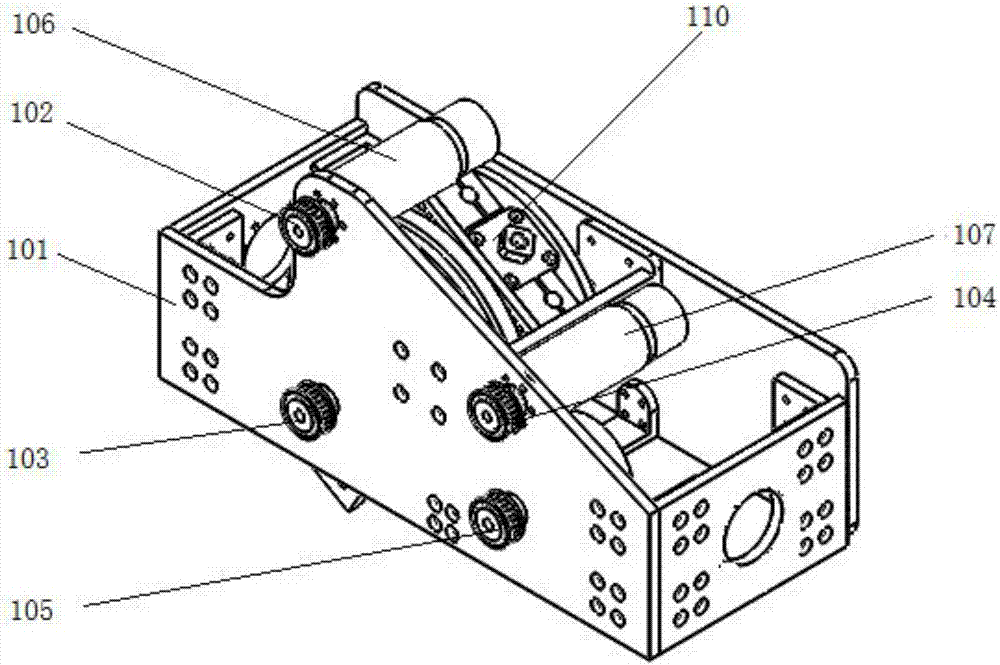
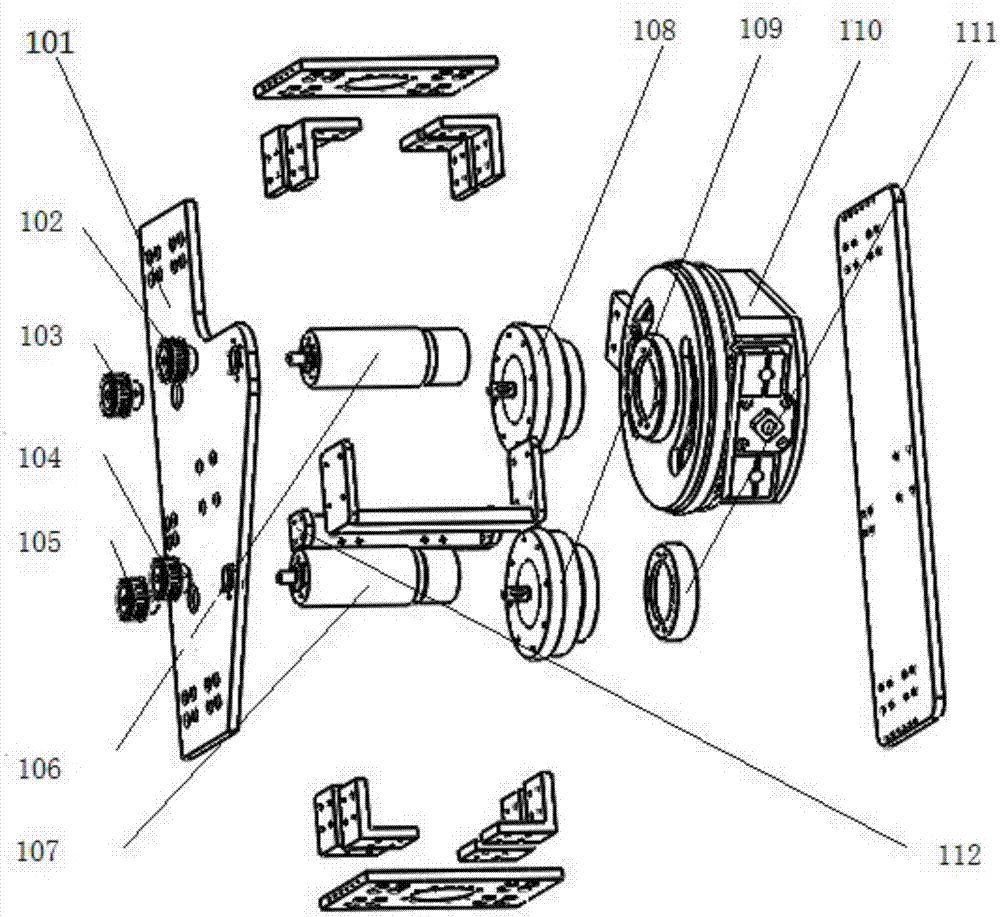
[0026] The pitch drive joint 1 (see figure 2 , image 3) includes joint support 101, No. 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More