

Non-calibration object registering method for pre-operation three-dimensional images and intra-operative perspective images
A technology of three-dimensional image and three-dimensional image, which is applied in the directions of image enhancement, image analysis, image data processing, etc., can solve the problems of limited set size and range, low accuracy, and high cost, so as to improve reliability and accuracy, Guaranteed accuracy and reduced damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
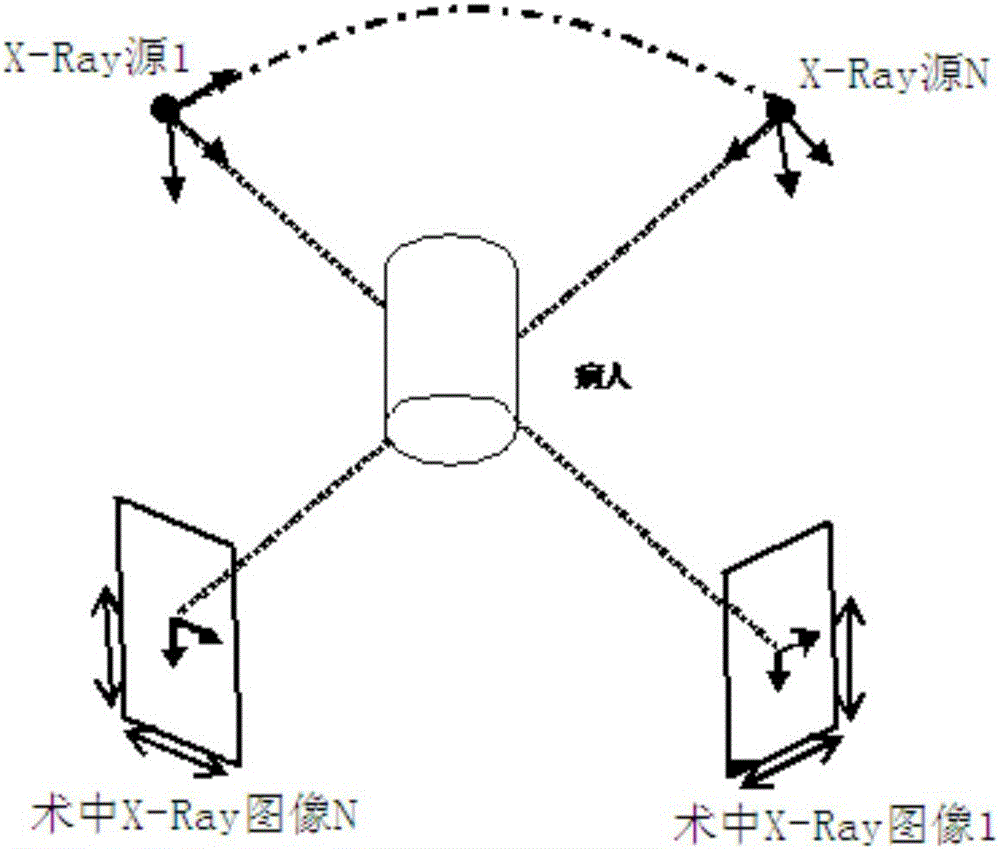
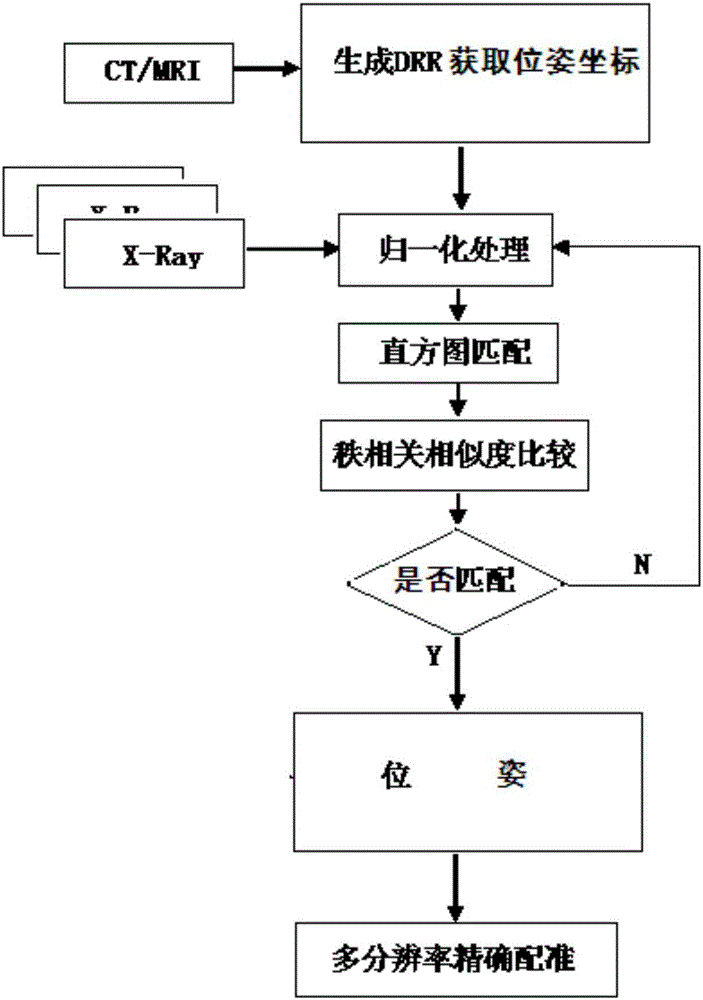
[0017] Such as Figure 1 ~ Figure 3 As shown, the present invention provides a calibration-free registration method of a preoperative three-dimensional image and an intraoperative perspective image, which includes the following steps:
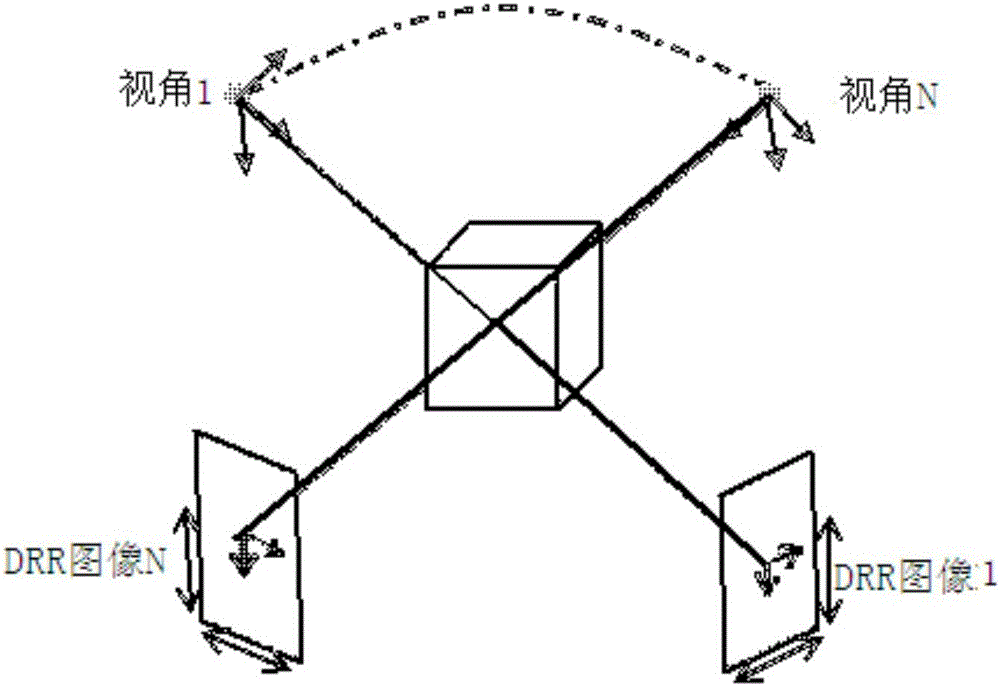
[0018] 1) Before the operation starts, a series of three-dimensional images are obtained by CT or MRI. According to the operation requirements, in the direction of viewing angle of the coronal, sagittal or transverse position, starting from 0°, the preset degrees at each interval are provided according to CT or MRI The three-dimensional image generates N radiographic images (DRR images), and obtains the corresponding pose parameter W; wherein, the preset degree is preferably 1° or 2°;
[0019] W=(θ x ,θ y ,θ z ,X,Y,Z) (1)
[0020] In the formula, θ x , θ y , θ z Indicates the direction of rotation, and X, Y, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More