High-precision signal processing system of sine and cosine encoder
A sine and cosine encoder and signal processing technology, applied in error detection coding, instruments, analog-to-digital converters, etc., can solve problems such as the inability to meet the requirements of the original signal subdivision difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0046]1. Incremental rotary encoder signal processing principle
[0047] Under ideal conditions, the incremental rotary encoder outputs two sine and cosine signals with a phase difference of 90 degrees between A and B. When the encoder rotates in the positive direction, the B output signal phase lags the A signal by 90 degrees; on the contrary, when the encoder rotates in the opposite direction, the A output signal phase lags the B signal by 90 degrees. When the encoder rotates in the forward direction, the signal waveform is output, such as Figure 8 as shown, Figure 8 Output signal waveform diagram for the positive rotation of the encoder.
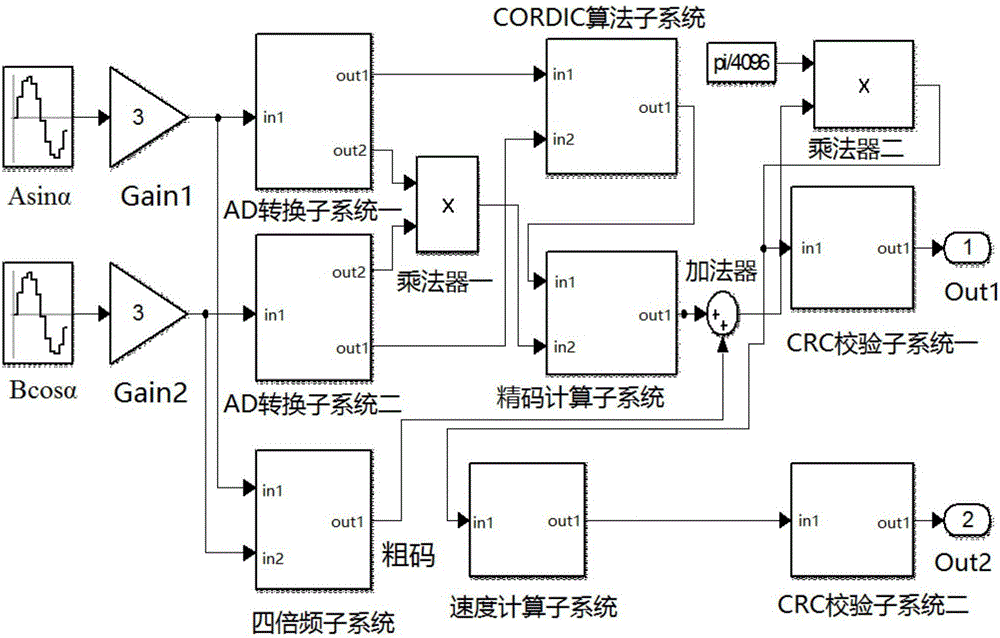
[0048] The initial signal of the encoder needs to be converted and processed before information such as the motor angle position can be obtained. In terms of signal processing, the encoder output signal is divided into two paths, such as Figure 9 as shown, Figure 9 It is a functional block diagram of the rotary encoder signal pro...
Embodiment 2
[0081] Assuming practical application:
[0082] 1. The encoder resolution is 2048 lines;
[0083] 2. The motor speed is 3000rpm;
[0084] 3. The feed rate of the screw rod per revolution of the motor is 5mm, that is, 5mm / r;
[0085] 4. The feed rate resolution reaches 0.0001mm, and the corresponding mechanical angle is 360 / (5 / 0.0001)=0.0072°=25.92″.
[0086] Let the encoder subdivision multiple be N, then: It is obtained that N>24.4, that is, the minimum 25 multiplier. Note: Since the frequency of the encoder interface unit has been multiplied by four, in order to achieve the ideal resolution, it needs to be multiplied by seven times, so that the overall subdivision multiple reaches 28 times.
[0087] When the rotational speed is 3000rpm, such as Figure 8 As shown, the frequency of the encoder output sine and cosine signals is:
[0088] Fine interpolation calculation formula:
[0089] Calculation formula of mechanical rotation angle:
[0090] Speed calculatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More