

Initialization method of the robot system
An initialization method and manipulator technology, which is applied in the direction of manipulators, surgical manipulators, surgical navigation systems, etc., can solve the problems of poor penetration and insertion, and achieve the effect of accurate initialization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
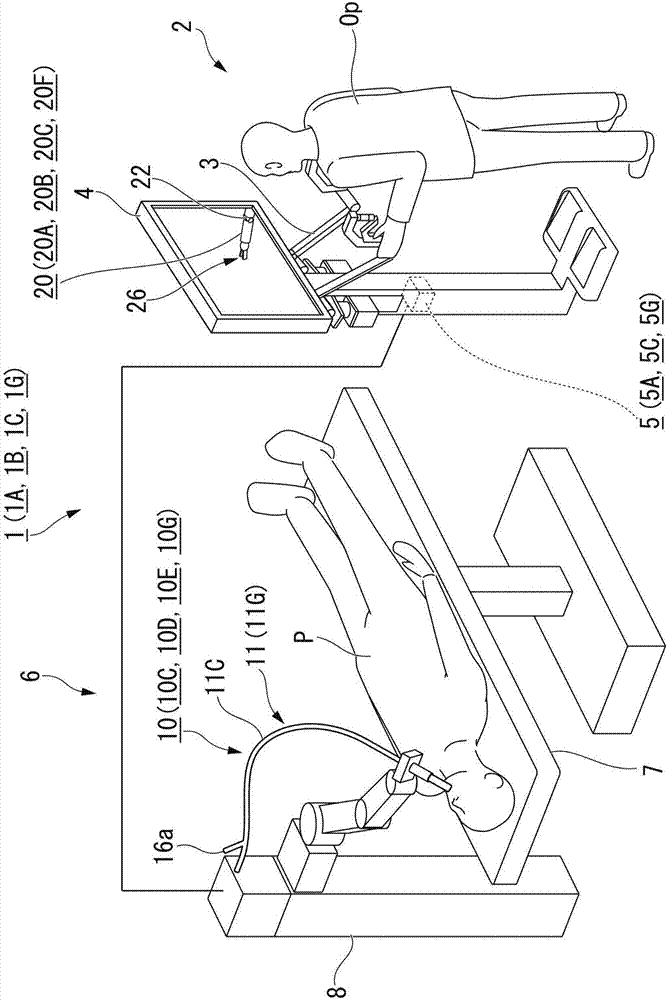
[0062] The robot system used in the method of initializing the robot system according to the first embodiment of the present invention will be described.
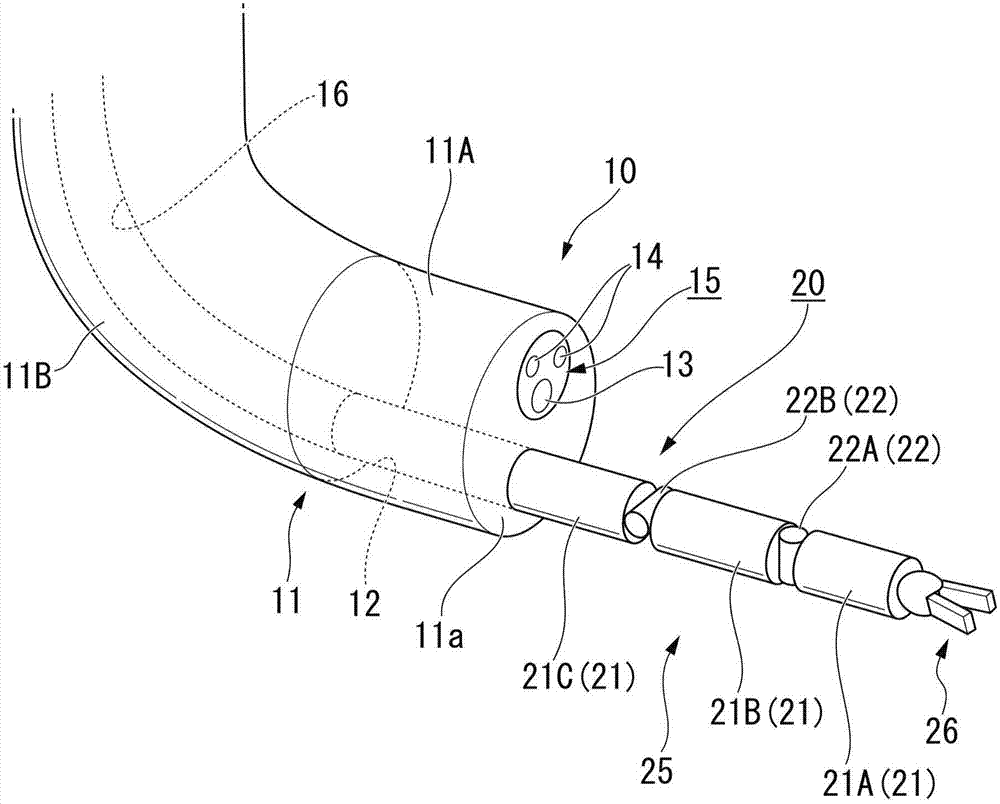
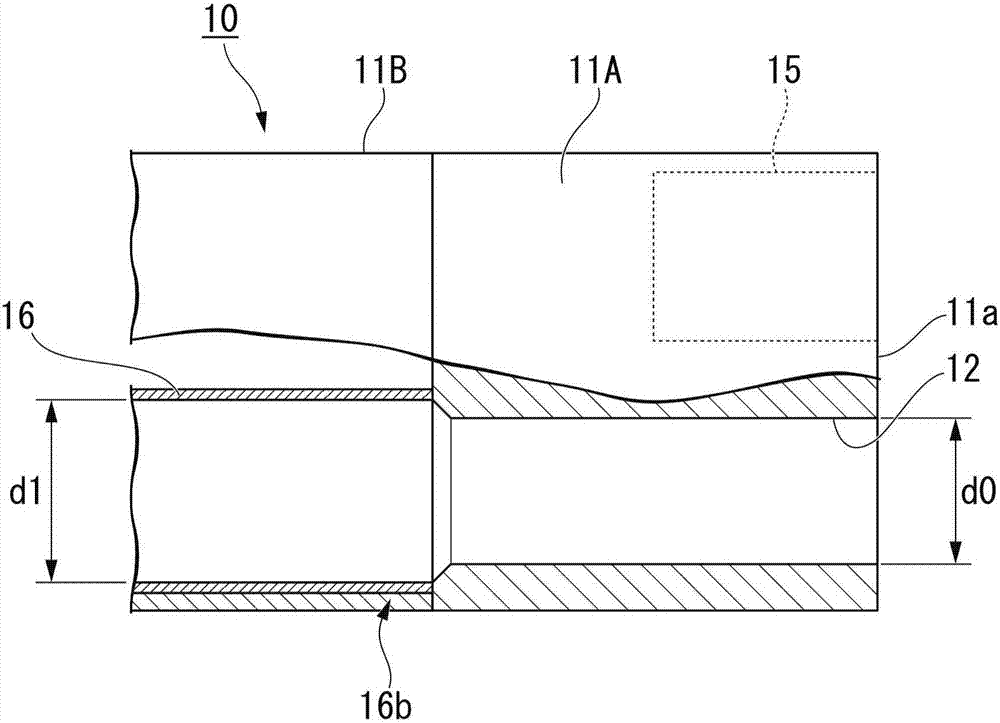
[0063] figure 1 It is a schematic perspective view showing the overall configuration of the robot system used in the method of initializing the robot system according to the first embodiment of the present invention. figure 2 It is a schematic perspective view showing the appearance of a shape defining member and a medical instrument used in the initialization method of the robot system according to the first embodiment of the present invention. Figure 3A It is a partial sectional view showing a shape defining member used in the initialization method of the robot system according to the first embodiment of the present invention. Figure 3B Yes Figure 3A right side view in . Figure 4 It is a schematic system configuration diagram of the medical instrument used in the method of initializing the robot system according t...
no. 2 Embodiment approach
[0232] Next, an initialization method of the robot system according to the second embodiment of the present invention will be described.
[0233] Figure 9 It is a schematic system configuration diagram of a medical instrument used in a method of initializing a robot system according to a second embodiment of the present invention. Figure 10 It is a schematic perspective view showing the configuration of the initial tension applying part of the medical instrument used in the initialization method of the robot system according to the second embodiment of the present invention. Figure 11 It is a schematic cross-sectional view showing the configurations of the driving unit and the driving force relay unit of the medical instrument used in the initialization method of the robot system according to the second embodiment of the present invention. Figure 12 It is a schematic sectional view showing the driving force canceling state of the driving force relay unit of the medical in...
no. 3 Embodiment approach
[0302] Next, an initialization method of the robot system according to the third embodiment of the present invention will be described.
[0303] Figure 15 It is a schematic system configuration diagram of the medical instrument and the shape defining member used in the initialization method of the robot system according to the third embodiment of the present invention. Figure 16A , Figure 16B It is a schematic cross-sectional view showing the relationship between the position of the joint position detection unit and the insertion position of the medical instrument used in the method of initializing the manipulator system according to the third embodiment of the present invention.
[0304] like figure 1 As shown, in the manipulator system 1C used in the initialization method of the manipulator system of this embodiment, instead of the medical instrument 20, the treatment endoscope device 10, and the control unit 5 of the manipulator system 1 in the first embodiment describ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More