

Variable-length bendable fully-flexible mechanical arm structure
A fully flexible, robotic arm technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of large space occupation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with accompanying drawing:
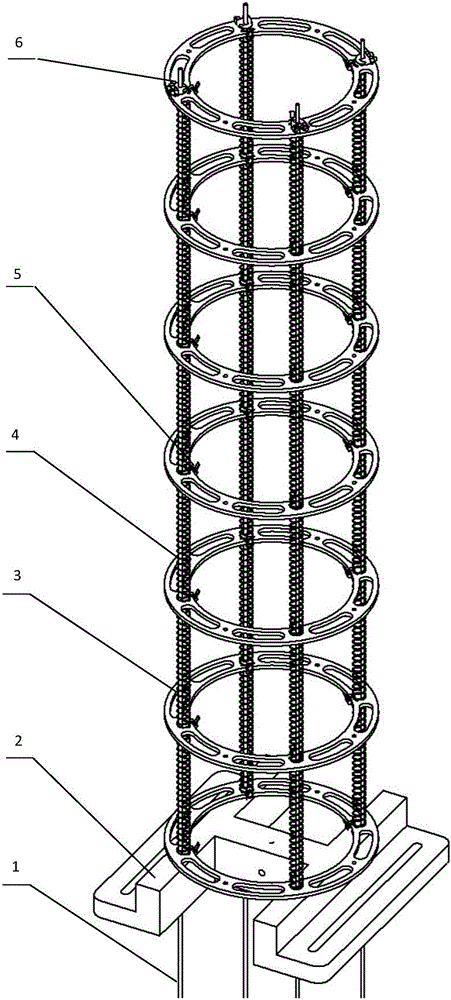
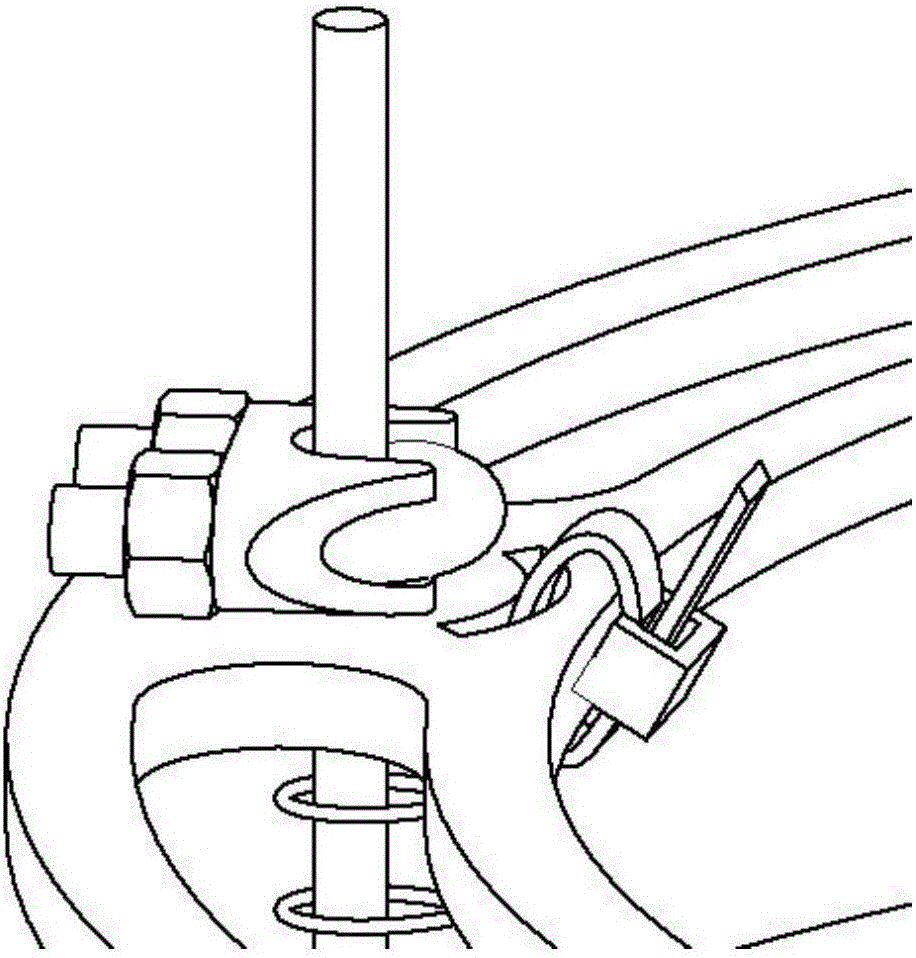
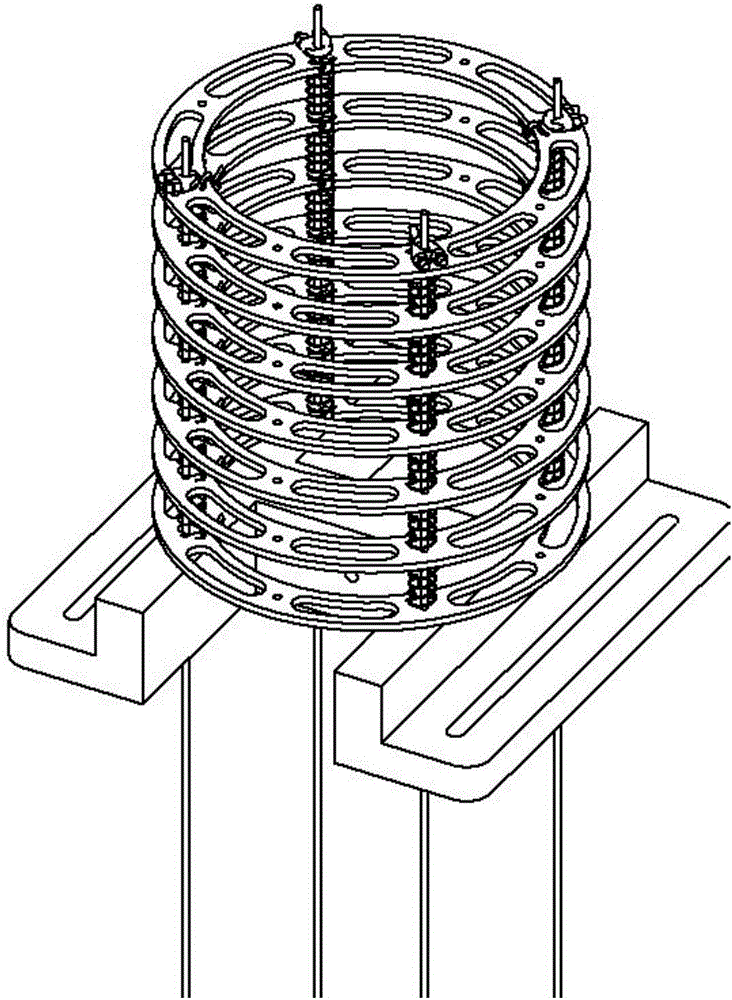
[0018] Such as figure 1 As shown, a variable-length curved fully flexible manipulator structure includes an elastic rod 1 , a base 2 , a metal segment 3 , a spring 4 , a cable tie 5 , and a U-shaped buckle 6 .
[0019] The elastic rod 1, the base 2, and the metal segment 3 are the flexible supporting parts of the structure, the spring 4 is the flexible deformation part of the structure, and the cable tie 5 and the U-shaped buckle 6 are the fastening and locking parts of the structure.
[0020] Each metal segment 3 is a hollow circular segment, and each metal segment 3 is arranged along a vertical direction. A mounting hole capable of passing through the elastic rod 1 is provided on the circumference of the metal segment 3 .
[0021] Each vertically arranged elastic rod 1 passes through the installation hole on the metal segment 3 respectively, and the elastic rod 1 on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More