

Quadruped robot platform
A quadruped robot and platform technology, used in motor vehicles, transportation and packaging, etc., can solve the problems of quadruped robot parts damage, reduce the reliability and durability of parts, adverse robot stability, etc., to improve energy utilization The effect of efficiency, fast motion response, and superior dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiment is a specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes, but it is not used as a limitation to the scope of protection of the claims of the present application.
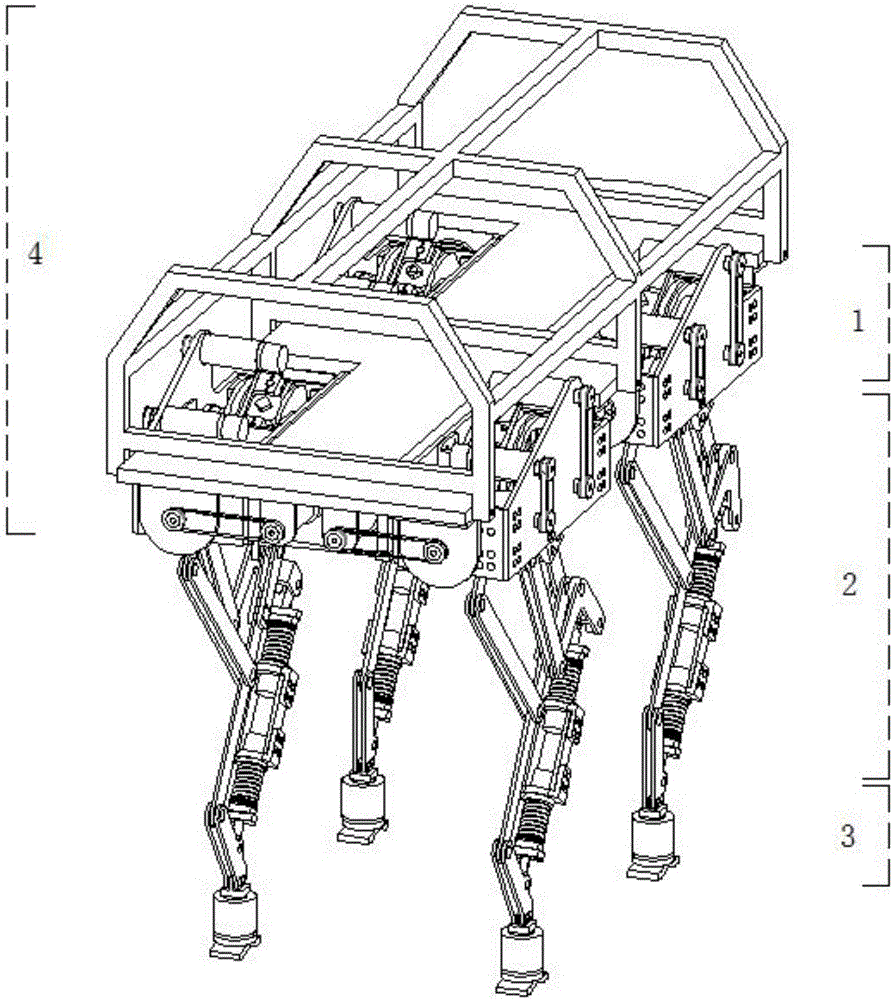
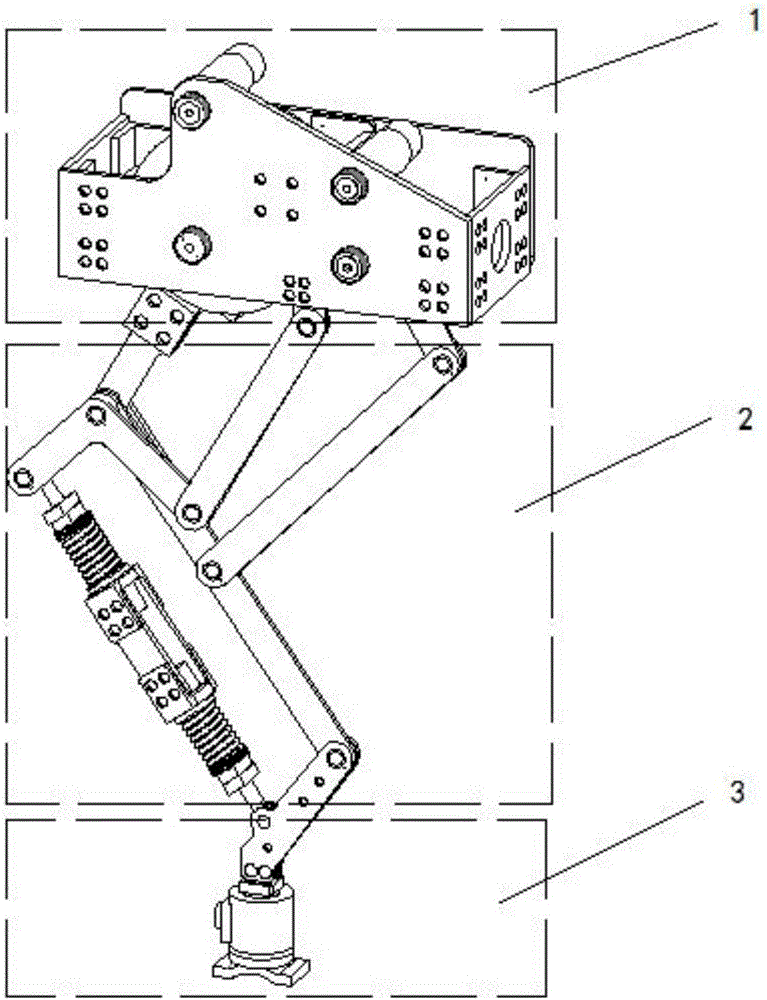
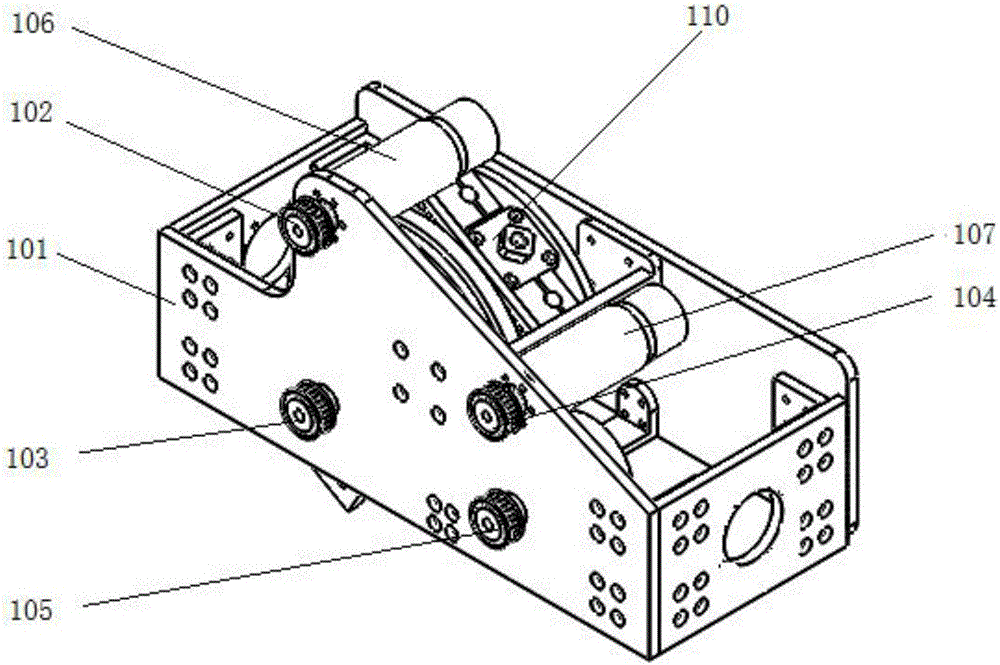
[0035] A kind of quadruped robot platform designed by the present invention (abbreviation platform, see Figure 1-12 ) includes a fuselage model and a leg module, characterized in that the leg module is a flexible leg of a planar five-bar mechanism, and the flexible leg or leg structure adopts a modular design, including a pitch drive joint (module) 1, a link mechanism (module) 2 and toe (module) 3; one end of the link mechanism module 2 is connected to the pitch drive joint module 1, and the other end is connected to the toe module 3; the pitch movement joint module 1 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More