

Reducer anti-torque structure of medical robot
A reducer and anti-torque technology, applied in the field of medical equipment, can solve the problems of increasing the joint volume of the robot and increasing the cost, and achieve the effects of simple structure, cost saving and easy transformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
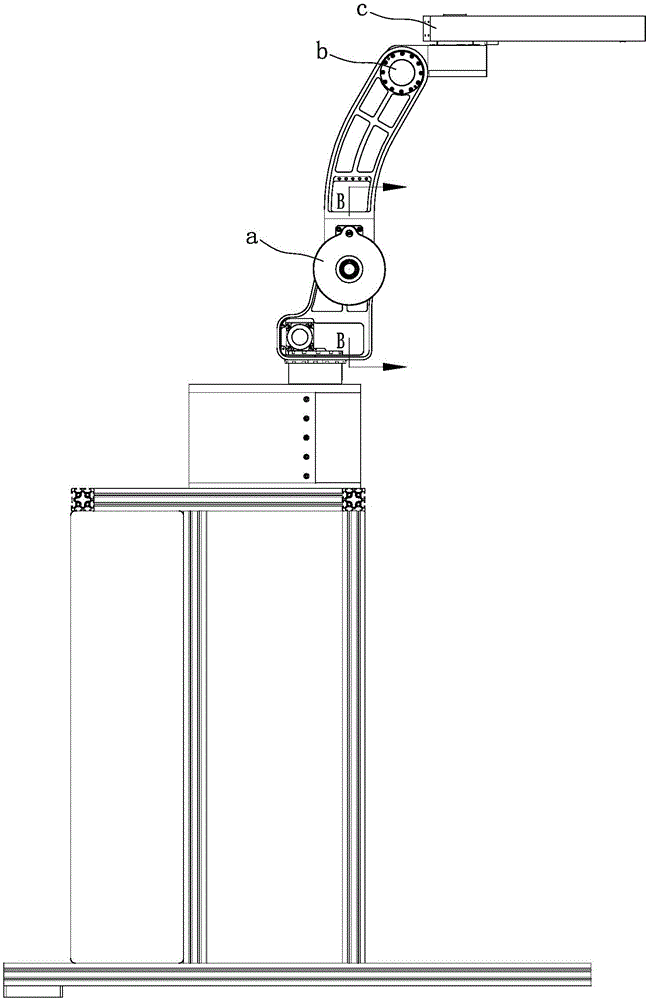
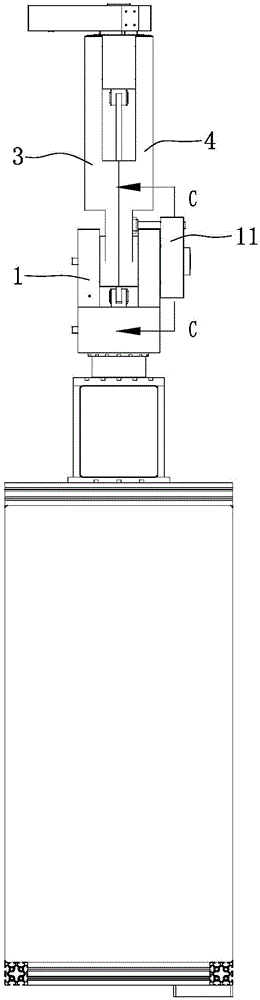
[0021] Such as figure 1 , figure 2 As shown, the mechanical arm of the medical robot is a series structure, which is composed of the first joint a, the second joint b and the third joint c. The first joint a is a pitch joint, which determines the up and down movement of the entire mechanical arm; the second joint b and the third joint c determine the movement of the manipulator in the plane. A medical inspection device may be installed at the end of the mechanical arm. Therefore, according to physical principles, if the end is heavy, the first joint a will bear a large moment when it moves up and down. If the torque margin of the motor or the reducer is insufficient when designing the robot, and the downward gravity cannot be balanced, it may cause the mechanical arm to slide down, thereby causing danger to the human body; if a motor or reducer with suffic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More