

Minimum base attitude disturbance track planning method for redundant space manipulator
A space manipulator and trajectory planning technology, applied in the aerospace field, can solve the problems of long convergence time, minimal disturbance of the base position without consideration, complex implementation of genetic algorithm, etc., to improve the accuracy and stability, and to plan the trajectory well. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The embodiments of the present invention are implemented on the premise of the technical solutions of the present invention, and detailed implementation methods and specific operation processes are given, but the protection scope of the present invention is not limited to the following embodiments.
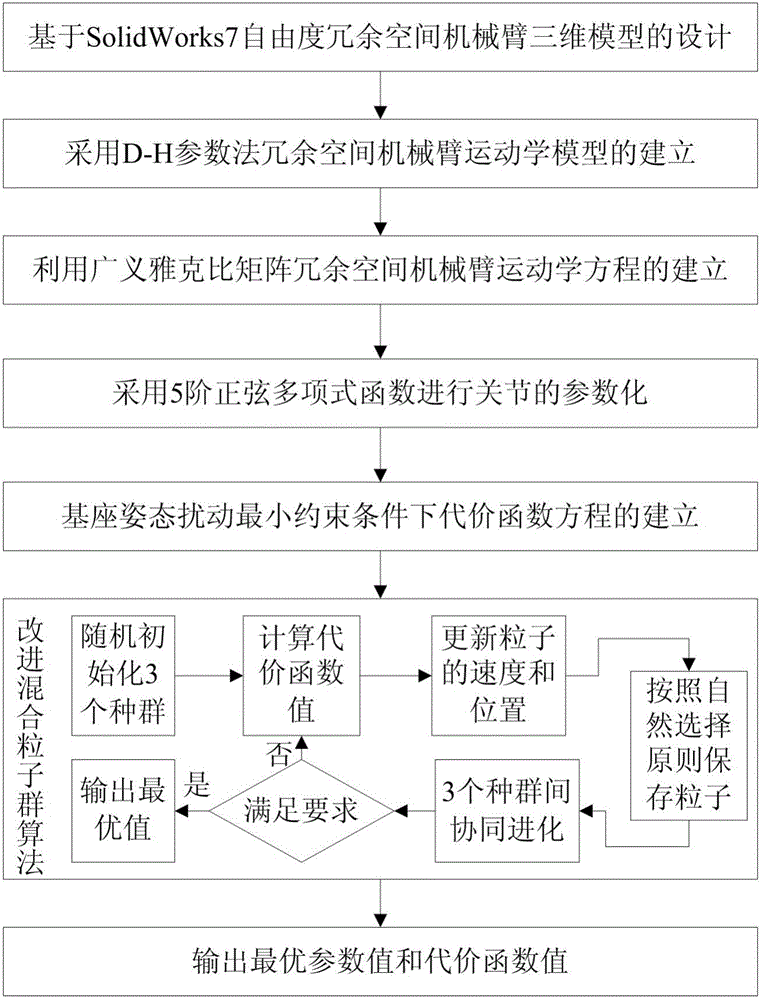
[0040] The specific implementation steps are as follows:
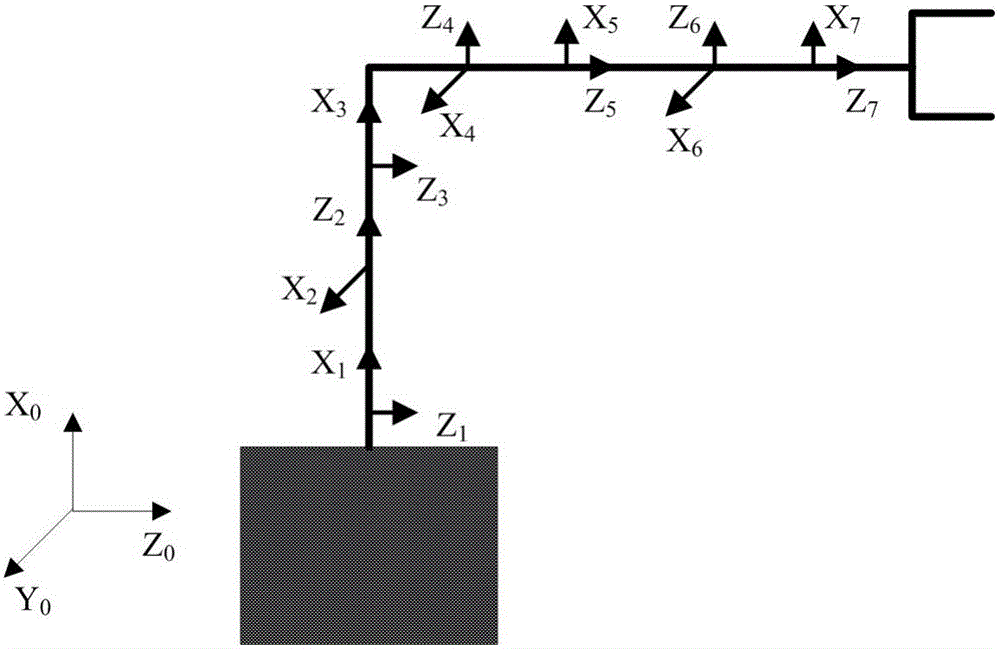
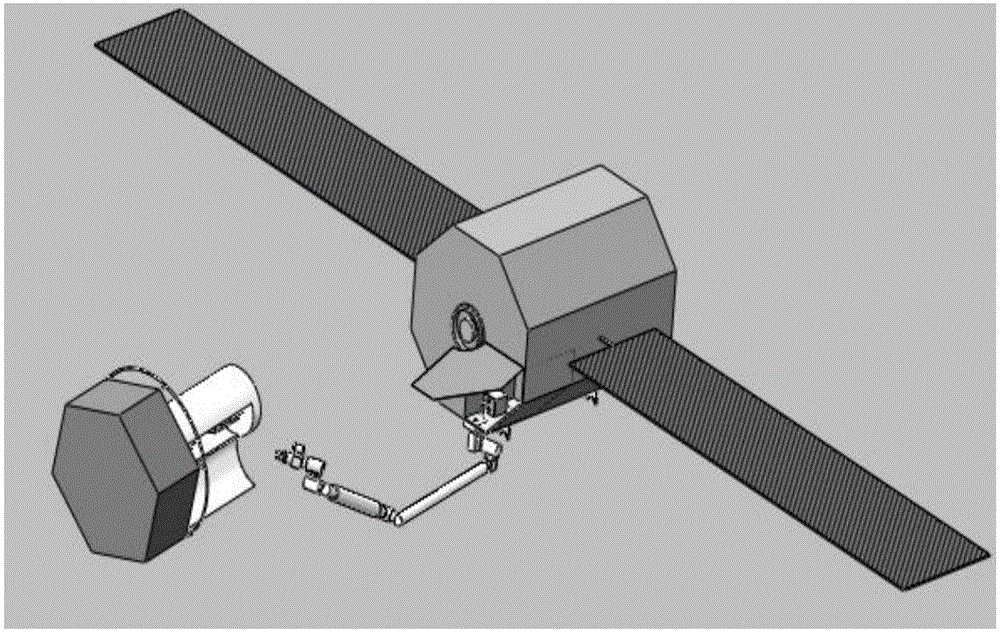
[0041] Step 1: The research object of the present invention is a redundant space manipulator, and its 7 degrees of freedom all adopt rotary joints, which can meet the on-orbit service in a complex space environment. There are four common structures, and the S-R-S structure adopted in this paper is proved to be optimal in kinematics. Its simplified design model is as figure 2 shown. According to the design model of the redundant space manipulator, the 3D modeling is carried out based on SolidWorks 2013. Modular and top-down design principles are adopted in the modeling process, that is, from sketch design-working...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More