

Bionic masticatory robot for denture and food detection
A chewing robot and food detection technology, applied in the field of robotics, can solve problems such as kinematics inversion, complex control, and huge mechanism, and achieve the effects of simple structure, good bionicity, and simple control calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
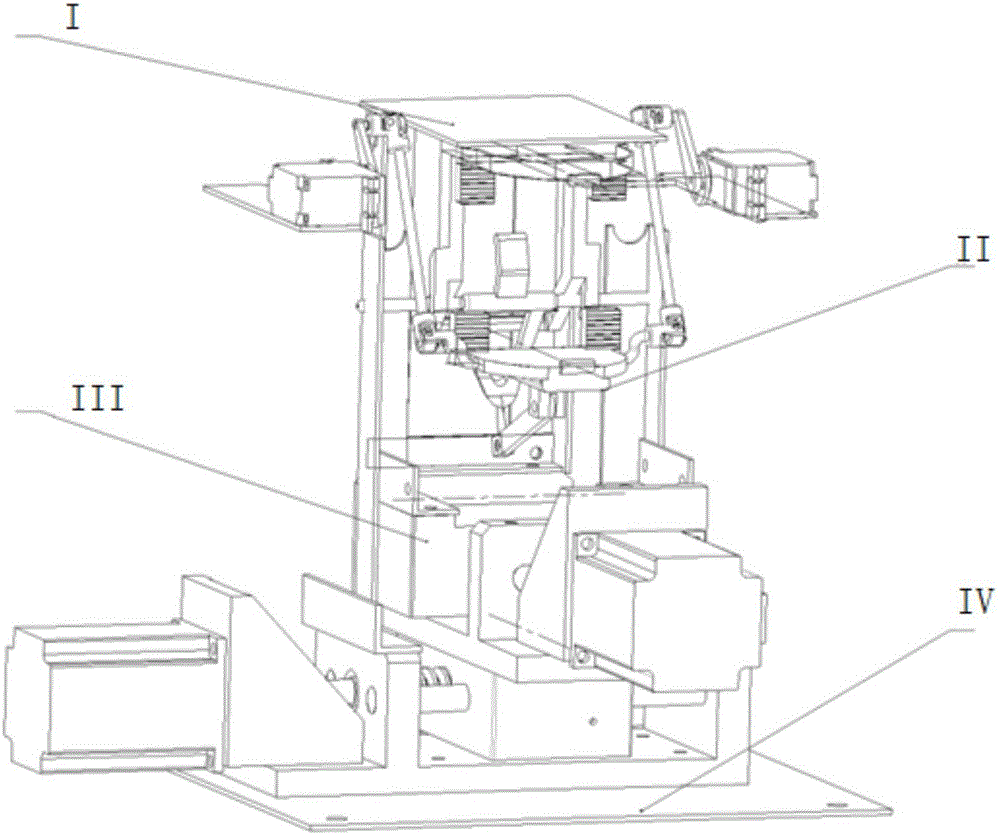
[0022] In practice, the present invention includes: XY working platform III, mandibular moving platform II, maxillary platform 21, temporomandibular connector 20, drive control system, and two driving chains; the two driving chains are symmetrically arranged on both sides of the mandibular moving platform II for control It moves up and down, the XY working platform III is set under the mandibular moving platform II and is connected by a connecting rod 19 , and the temporomandibular connecting piece 20 connects the mandibular moving platform II and the maxillary moving platform 21 .
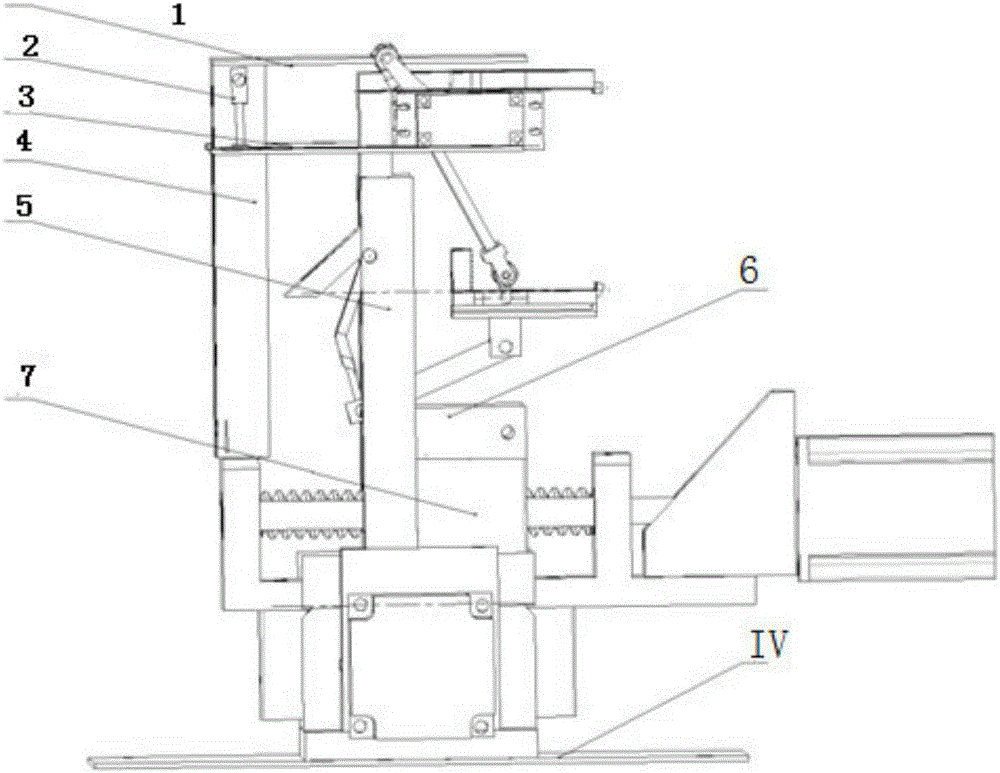
[0023] The XY working platform III is fixed on the bottom plate IV, the fixed upper platform I and the XY working platform III are fixed by the angle iron a4, there is a maxillary fixing plate 1 under the fixed upper platform I, and the upper jaw platform 20 is fixed on the upper jaw fixing plate through the L-shaped connecting piece 2 1, the mandibular moving platform II is set above the XY workin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More