

Robot adaptive grabbing method based on deep reinforcement learning
A technology of reinforcement learning and robotics, applied in adaptive control, instruments, control/regulation systems, etc., can solve problems such as unstable shape and position, complex grasping environment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
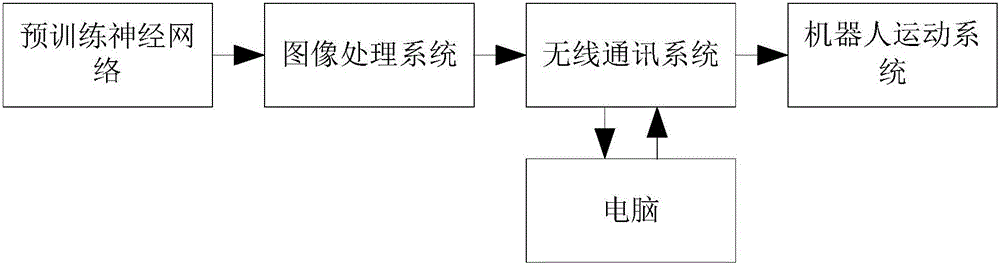
[0046] Such as figure 1 As shown, a robot adaptive grasping system based on a deep reinforcement learning method of the present invention includes: an image processing system, a wireless communication system and a robot motion system.
[0047] Among them, the image processing system is mainly composed of a camera installed in the front of the robot and matlab software; the wireless communication system is mainly composed of a WIFI module; the robot motion system is mainly composed of a base car and a mechanical arm; The deep reinforcement learning network of DDPG (Deep Deterministic Policy Gradient), in which the experience playback mechanism and the target Q value network are usually used to ensure that the deep reinforcement learning network based on DDPG can converge during the pre-training process, and then The image processing system acquires the image of the target object, and transmits the image information to the computer through the wireless communication system. When...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More