

Unmanned surface vehicle navigation and control teleoperation platform
An unmanned boat and remote operation technology, applied in the field of unmanned boat control, can solve the problems of small data transmission bandwidth, unrecoverable, unsuitable for over-the-horizon remote control, etc., to achieve the effect of full automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
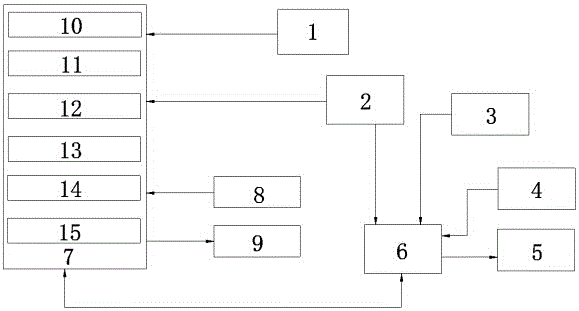
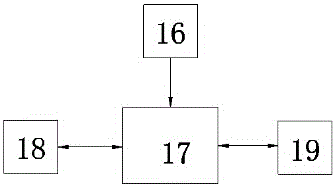
[0026] see Figure 1-3, the present invention provides a technical solution: a surface unmanned boat navigation and control remote operation platform, including navigation radar 1, automatic identification system 2, attitude reference system 3, speed and rudder angle sensor 4, rudder control module 5 , the boat-borne industrial control computer 6 and the shore-based / mothership control computer 7, the shore-based / mothership control computer 7 and the boat-borne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More