

A rehabilitation robot control method based on electromyography feedback type impedance self-adaption
A rehabilitation robot and control method technology, applied in muscle training equipment, applications, sensors, etc., can solve the problems of secondary injuries, reliability cannot be effectively guaranteed, etc., and achieve the natural effect of the control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
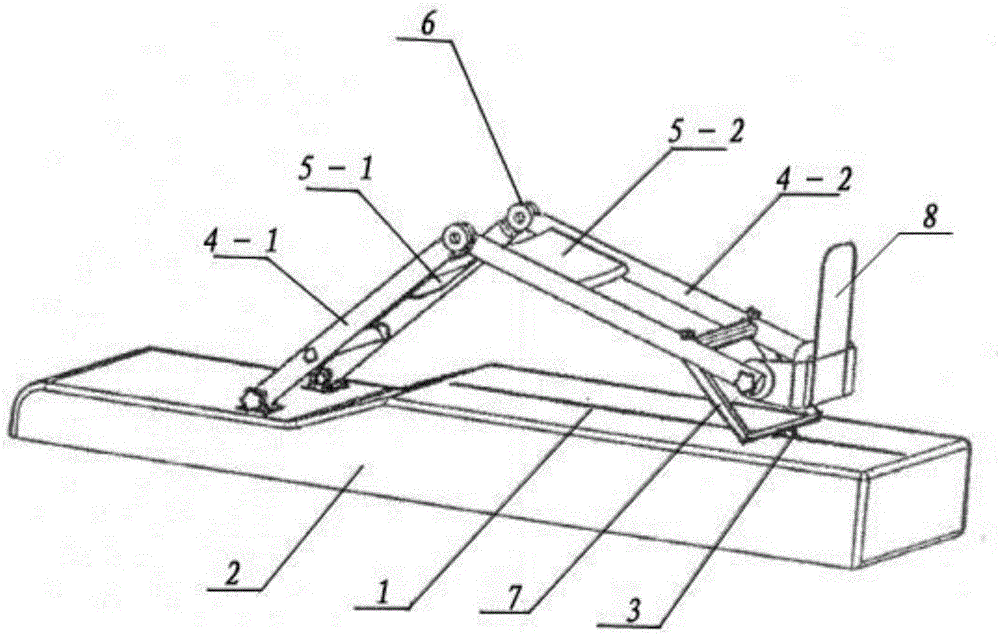
[0048] combine figure 1 : The lower limb rehabilitation training device of this embodiment is a horizontal rehabilitation robot, which is used to realize the single degree of freedom extension and flexion of the lower limbs. The mechanism includes a slide rail 1, a base 2, a lower limb mechanical leg, a ball screw 3, a driving motor, and a pedal 8; the lower limb mechanical leg includes a calf support rod 4-2, and a calf support sleeve 5-2 is connected by a rotating pair 6 , wherein the thigh support sleeve and the calf support sleeve are used to fix the patient’s lower limbs, the upper end of the thigh support rod is connected with the base through a rotating pair, the lower end of the calf support rod is connected with the ball screw through a rotating pair 7, and the driving motor is placed in the base and passed through The ball is connected with the end of the mechanical leg, and drives the end of the mechanical leg to slide in the slide rail. The pedal 8 is the interact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More