

Linear Suspension and Shock Absorption Device for Wheeled Mobile Robot Chassis
A mobile robot, suspension and shock absorption technology, applied in the field of robotics, can solve the problems of high cost and complicated electric control, and achieve the effect of low cost, simple structure and sufficient grip performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
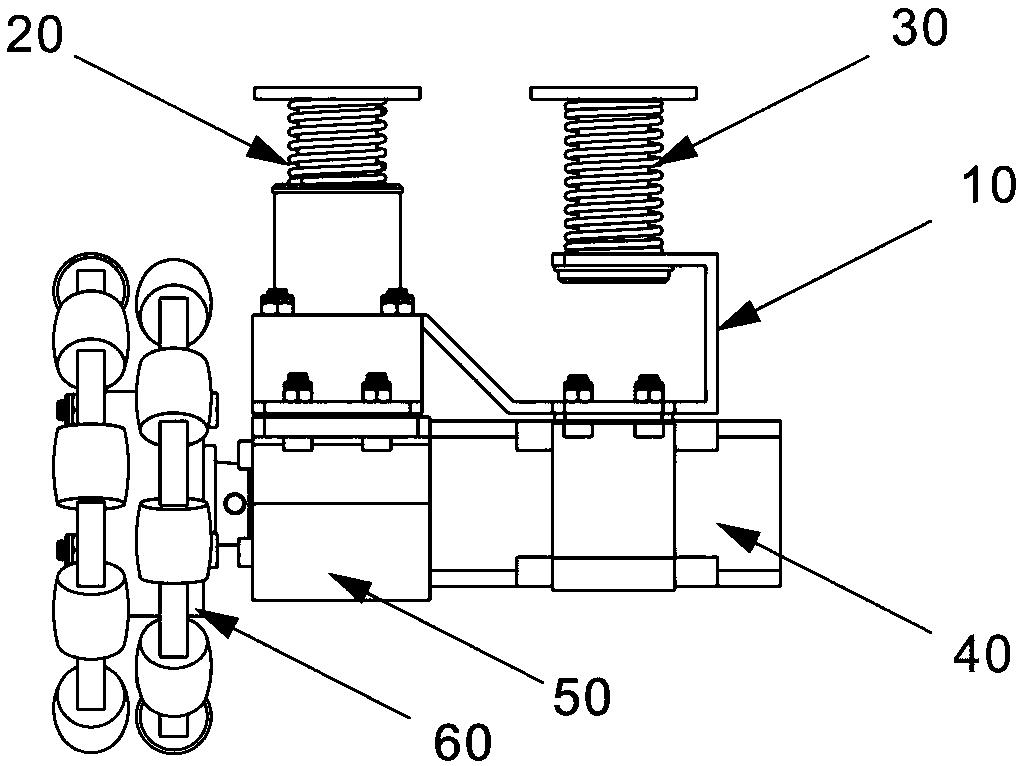
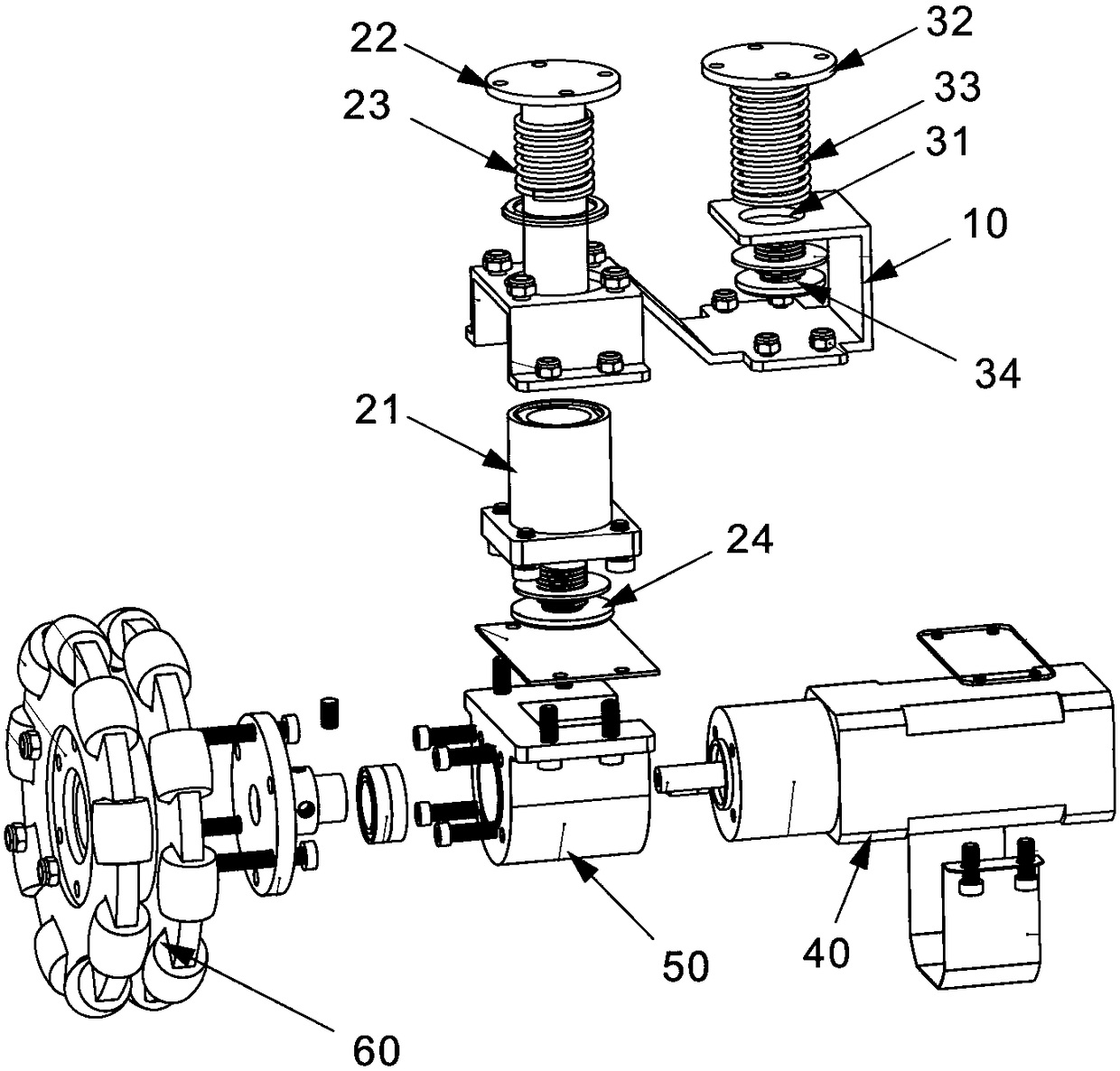
[0019] Such as figure 1 As shown, the linear suspension shock absorber of the wheeled mobile robot chassis includes a suspension shock absorber assembly for connecting the robot chassis, and a motion assembly connected to the bottom of the suspension shock absorber assembly, wherein:
[0020] Described suspension damping assembly comprises support 10, motion main shaft 20 and motion sub-shaft 30, has elasticity between support two ends, and motion main shaft 20 and motion sub-shaft 30 are respectively arranged at support 10 two ends, and motion main shaft 20 and motion sub-shaft The top of 30 is connected with robot chassis (not shown in the figure), and the bottom of motion main shaft 20 and motion sub-shaft 30 keeps elastic contact with support 10 top surface;
[0021] The motion assembly includes a motor 40, a motor base 50 and a wheel 60 connected in sequence, the motor 40 and the motor base 50 are connected to the bottom surface of the support 10, the motor 40 is fixed be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More