

Method and system for improving DC voltage utilization ratio of three-phase and four-switch fault-tolerant inverter
A DC voltage, four-switch technology is applied in the field of improving the DC voltage utilization rate of a four-switch fault-tolerant inverter, which can solve the problems of reducing the load capacity, limiting the accuracy of the algorithm, and not considering the problem of the voltage imbalance of the DC side busbar capacitors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0173] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the implementation of the present invention. example, not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
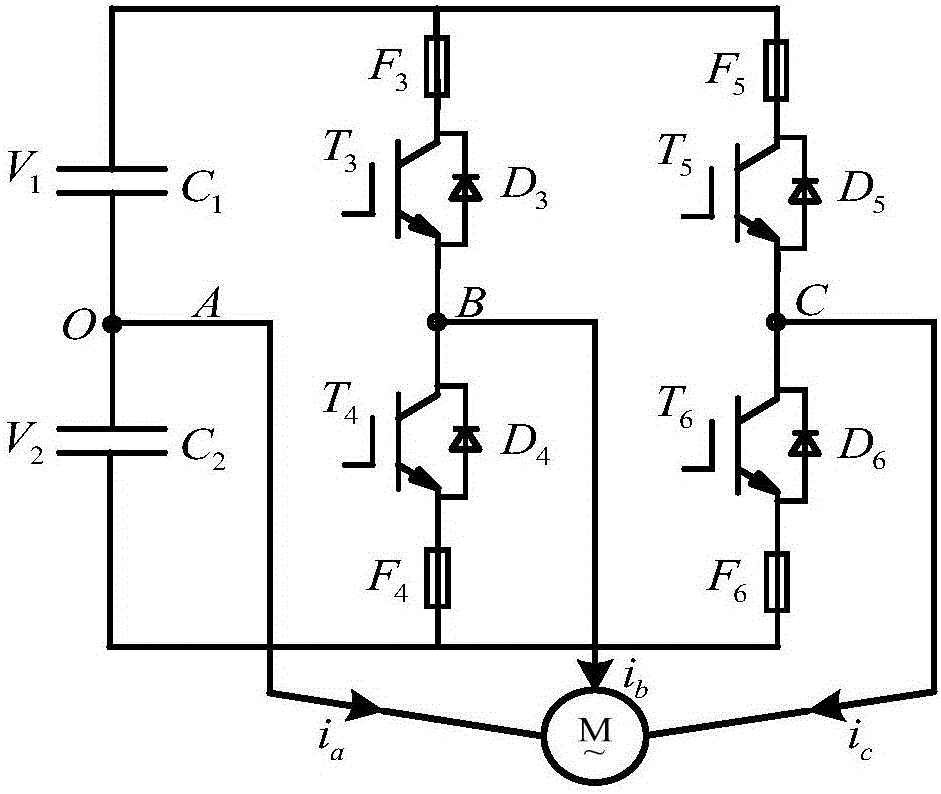
[0174] After a bridge arm (such as phase a) of the three-phase six-switch inverter fails, its main circuit topology is reconstructed to obtain the main circuit topology of the four-switch fault-tolerant inverter, as shown in figure 1 Shown; The present invention carries out the explanation of four-switch fault-tolerant inverter overmodulation method with a phase...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More