

Control method for united actuating mechanism of flexible agile satellite
A joint execution and control method technology, applied in the field of satellite attitude control, can solve problems such as strong nonlinearity, difficulty in meeting control requirements, and easy vibration, and achieve the effect of attitude control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
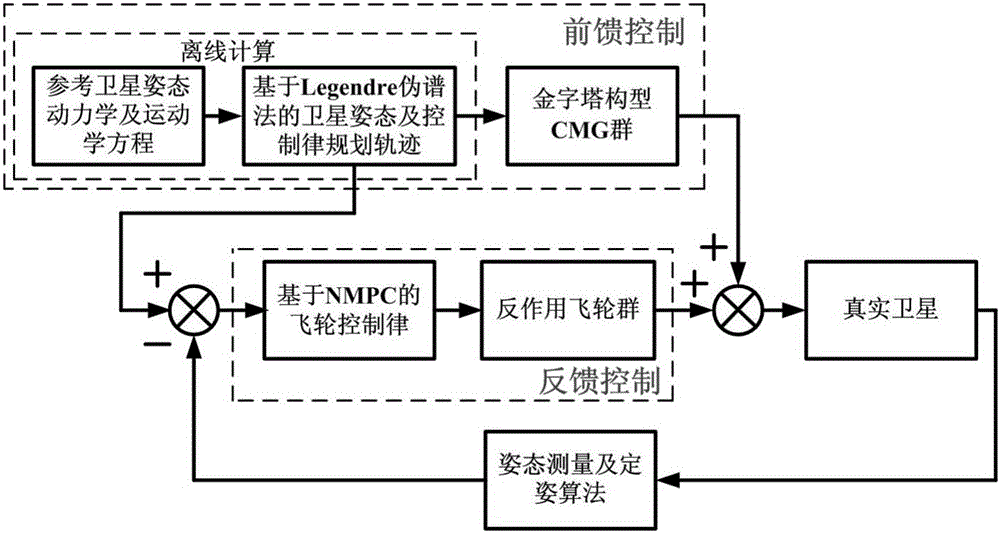
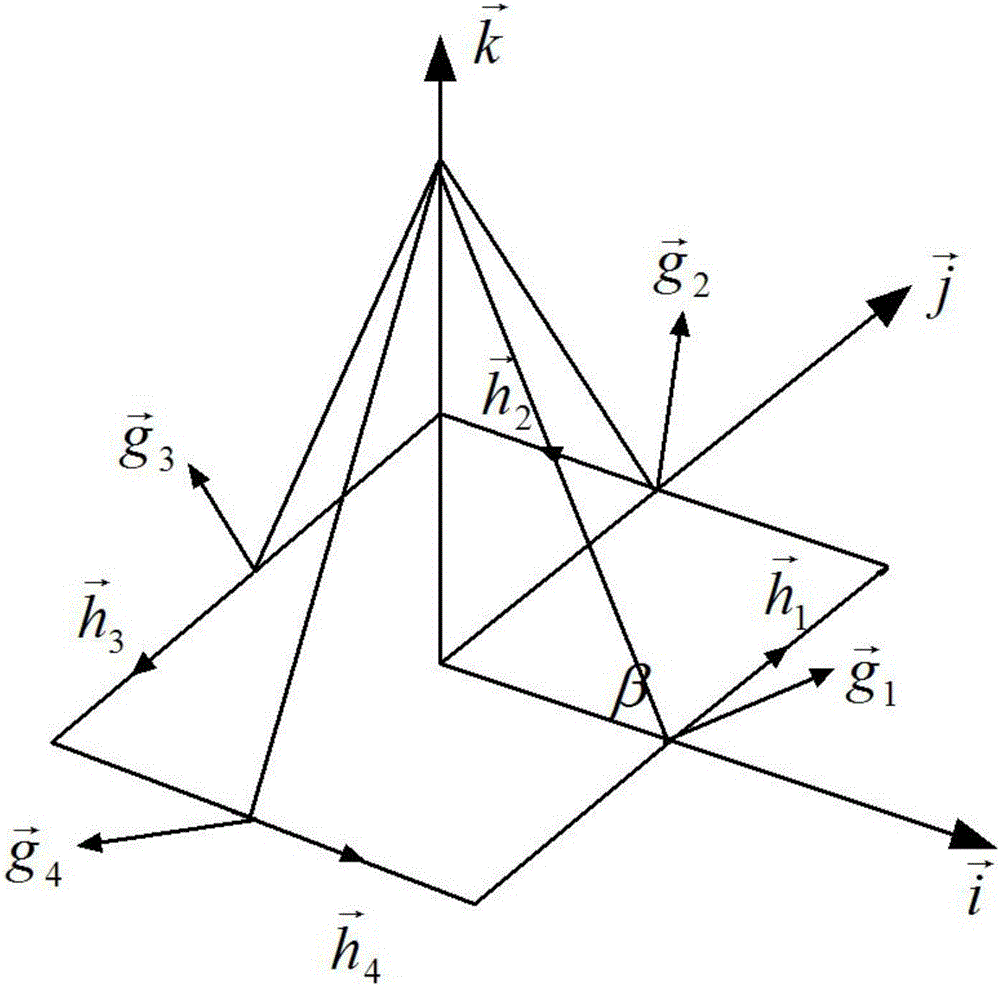
[0023] Specific implementation mode 1. Combination Figure 1 to Figure 4 Describe this embodiment, the joint actuator control method of the flexible agile satellite, the method is realized by the following steps:
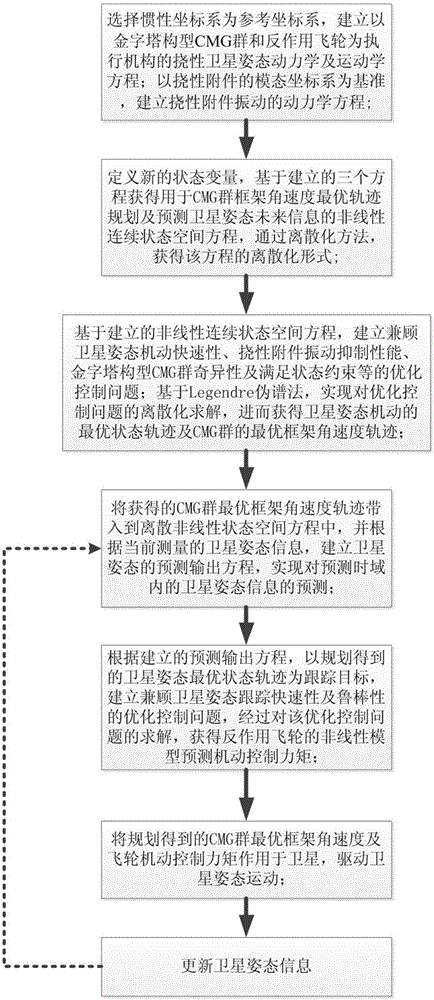
[0024] Step A: select the inertial coordinate system as the reference coordinate system, set up the flexible satellite attitude dynamics and kinematics equations with the pyramid configuration CMG group and the reaction flywheel as the actuator; take the modal coordinate system of the flexible attachment as the benchmark, establish Dynamic equations for the vibration of the flexible attachment;
[0025] Step B: define a new state variable, obtain the nonlinear continuous state space equation for the optimal trajectory planning of the frame angular velocity of the CMG group and predict the future information of the satellite attitude based on the three equations established, and obtain the discreteness of the equation through the discretization method into the form;...
specific Embodiment approach 2
[0032] Specific embodiment two, combine Figure 1 to Figure 6 This implementation mode is described. This implementation mode is an embodiment of the joint actuator control method of the flexible agile satellite described in the first specific implementation mode. The specific process is as follows:
[0033] 1. Taking the inertial coordinate system as the reference coordinate system, the attitude dynamics of the established flexible satellite with joint actuators is:
[0034] I w · + σ T η ·· + [ w × ] I w + [ w × ] σ T η · = - H · C M G ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More