

Underground excavation trolley drilling depth control method and system and underground excavation trolley drilling device
A technology of drilling depth and control method, which is applied to the automatic control system of drilling, earthwork drilling and production, drilling equipment, etc. It can solve the problems of overworked bolting, slow drilling progress, stuck drill and other problems, so as to improve the service life , Guarantee the effect of drilling efficiency and uniform drilling speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048]The present invention will be described in detail below. In the following paragraphs, different aspects of the embodiments are defined in more detail. Aspects so defined may be combined with any other aspect or aspects unless specifically stated otherwise. In particular, any feature considered to be preferred or advantageous may be combined with one or more other features which are considered to be preferred or advantageous.
[0049] Terms such as "first" and "second" appearing in the present invention are only for convenience of description, to distinguish different components with the same name, and do not indicate a sequence or a primary and secondary relationship.
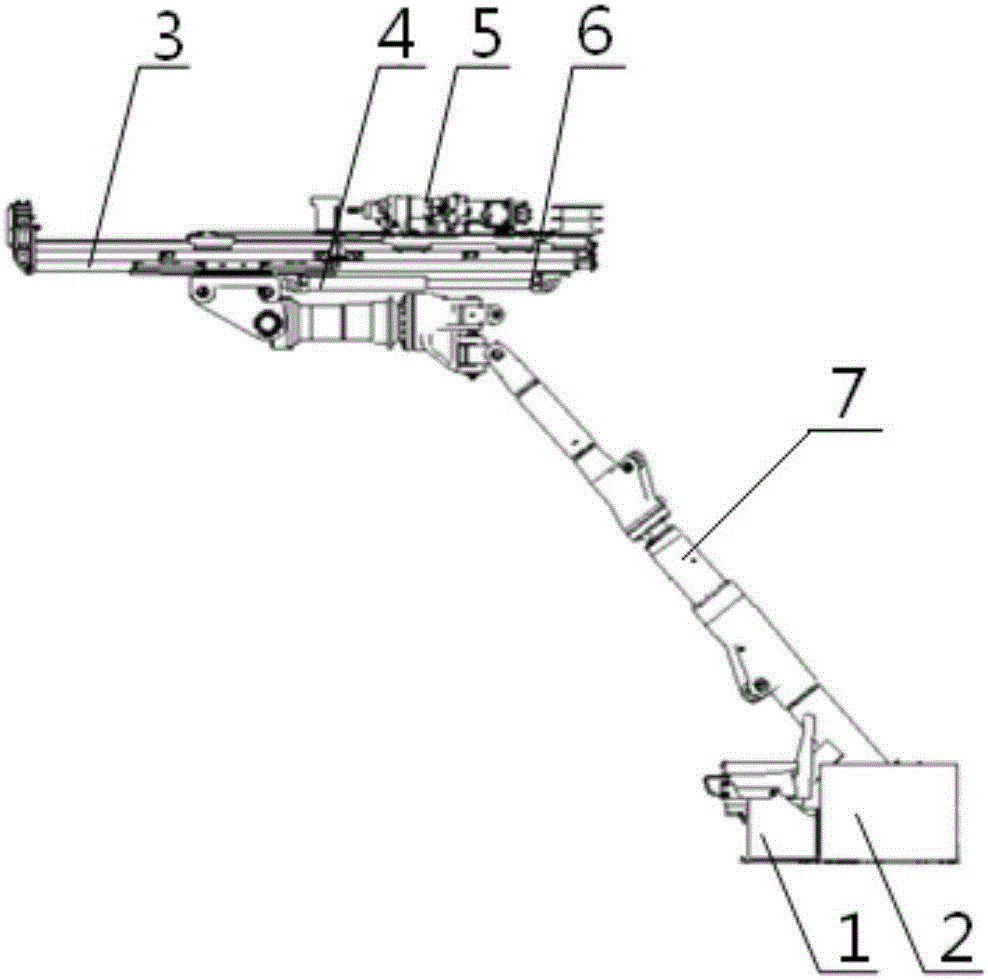
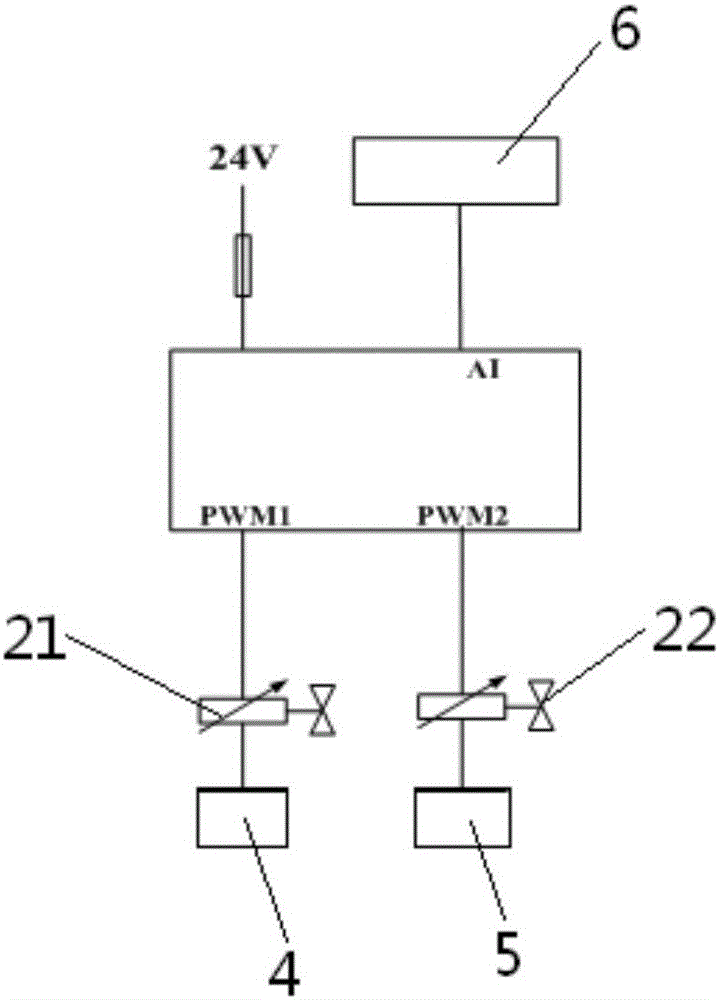
[0050] First of all, the present invention provides a drilling depth control system for underground excavation trolley, such as figure 1 As shown, it includes a control part 1, a length detection part 6 and a proportional regulating valve group 2. The length detection part 6 is arranged on the hydrauli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More