

Pedestrian dead reckoning method based on low-cost multisensor fusion
A technology of multi-sensor fusion and dead reckoning, applied in the fields of inertial navigation system, control science, indoor positioning system, and computer science, it can solve problems such as poor hardware quality, low sensor accuracy, and susceptibility to external interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0181] The pedestrian dead reckoning method based on low-cost multi-sensor fusion includes the following steps:
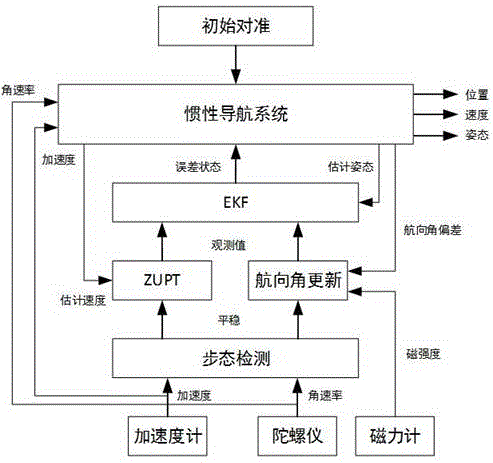
[0182] The complete flow chart of the present invention sees figure 1 ;
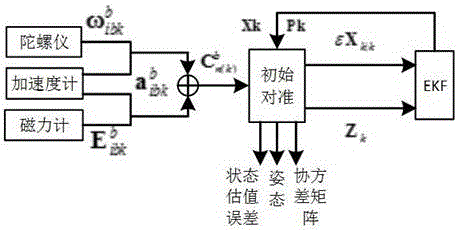
[0183] Step 1: Initial coarse alignment to obtain attitude
[0184] 1.1) If i represents the inertial coordinate system, e represents the earth coordinate system. Indicates the component of the angular velocity of the e system relative to the i system under the b system. Indicates the component of the angular velocity of the b system relative to the e system under the b system, Indicates the component of the acceleration of b-system relative to i-system under b-system. The speed at the static initial moment is 0, and the output of the accelerometer is:
[0185] a i b b = v b + ( 2 ω ...
Embodiment 2
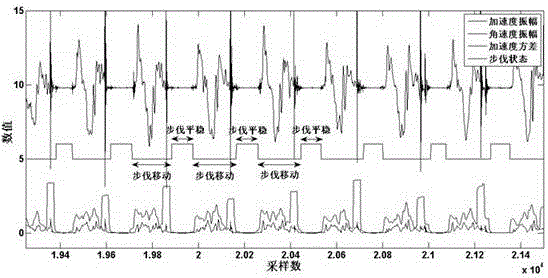
[0348] In order to evaluate the actual positioning of the "low-cost multi-sensor fusion pedestrian dead reckoning method", the technical process in Example 1 is used, and the device used is the iPad air 2 product launched by Apple in October 2014. The experiment was completed in the indoor rectangular conference hall. The length of the test route was 50.4m, and the sampling frequency was set to 100Hz. The data was collected by walking with a handheld iPad. The original experimental data can be obtained through the SensorLog software.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More