

A rehabilitation device capable of exercising the mobility of the shoulder joint and the autonomous force of the arm
A mobility and rehabilitation device technology, applied in passive exercise equipment, sports accessories, physical therapy and other directions, can solve the problems of not being able to train shoulder joint mobility well, unfavorable for quick recovery of patient's function, etc. The effect of large range of motion, increased speed and effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
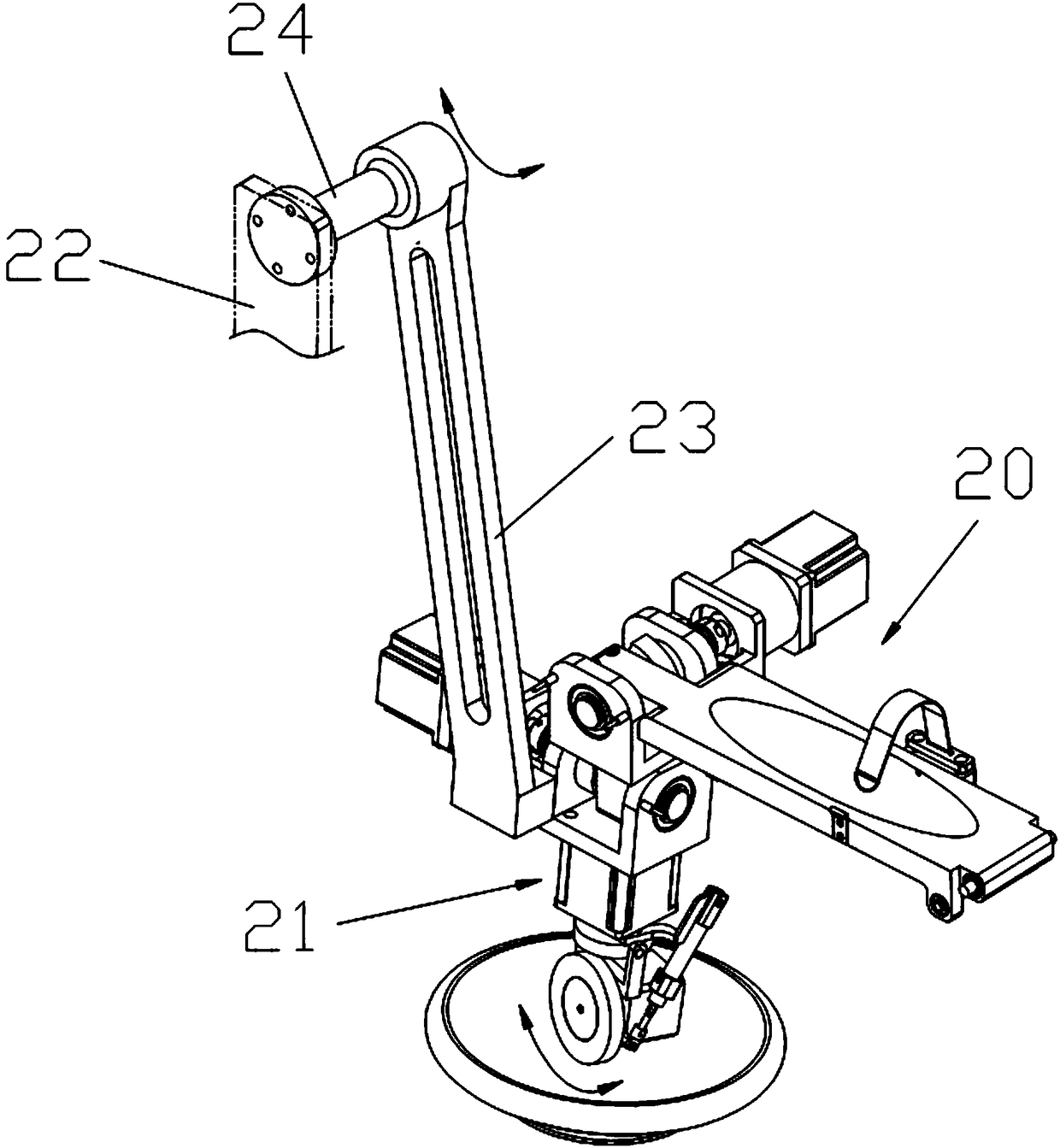
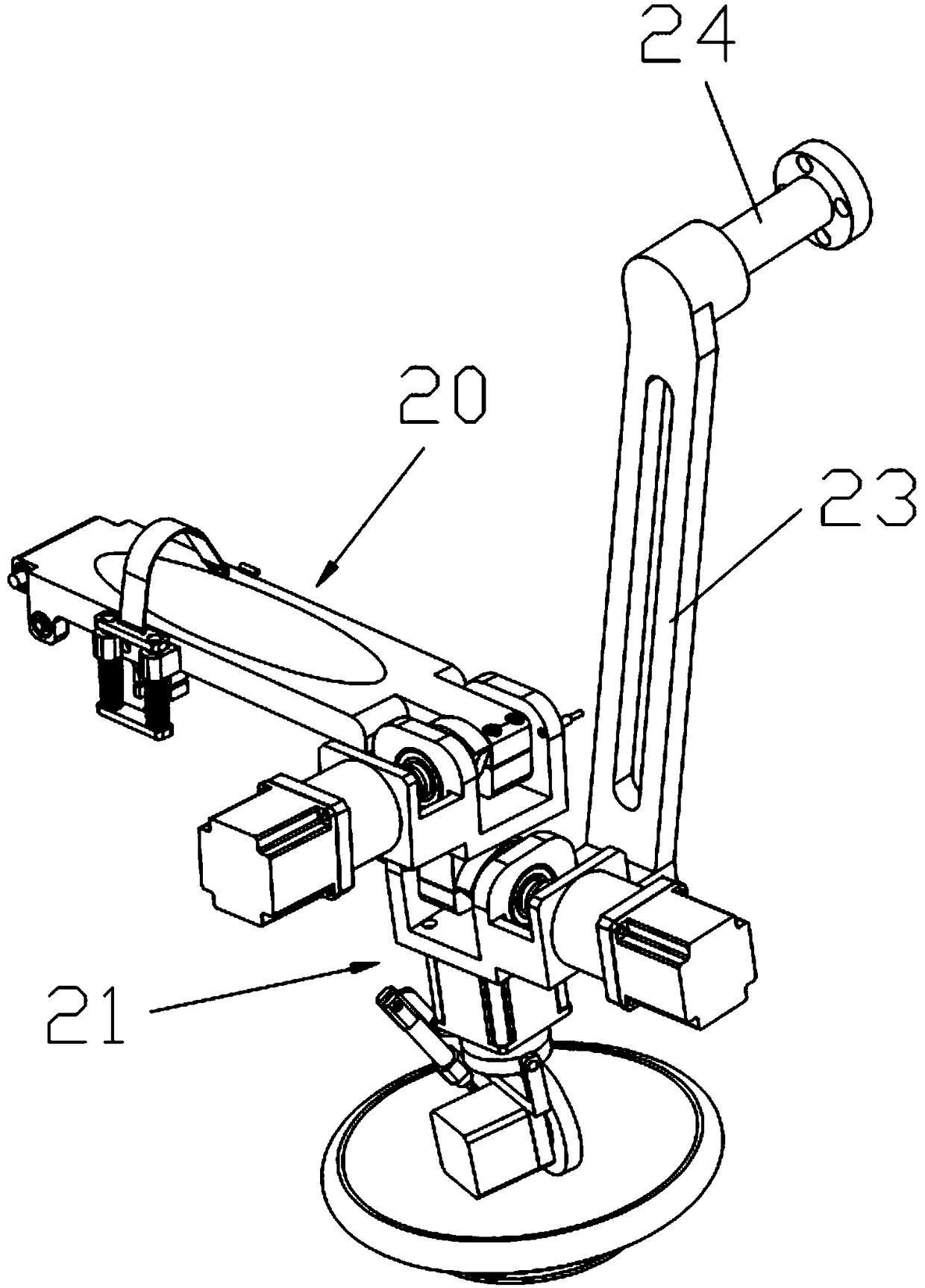
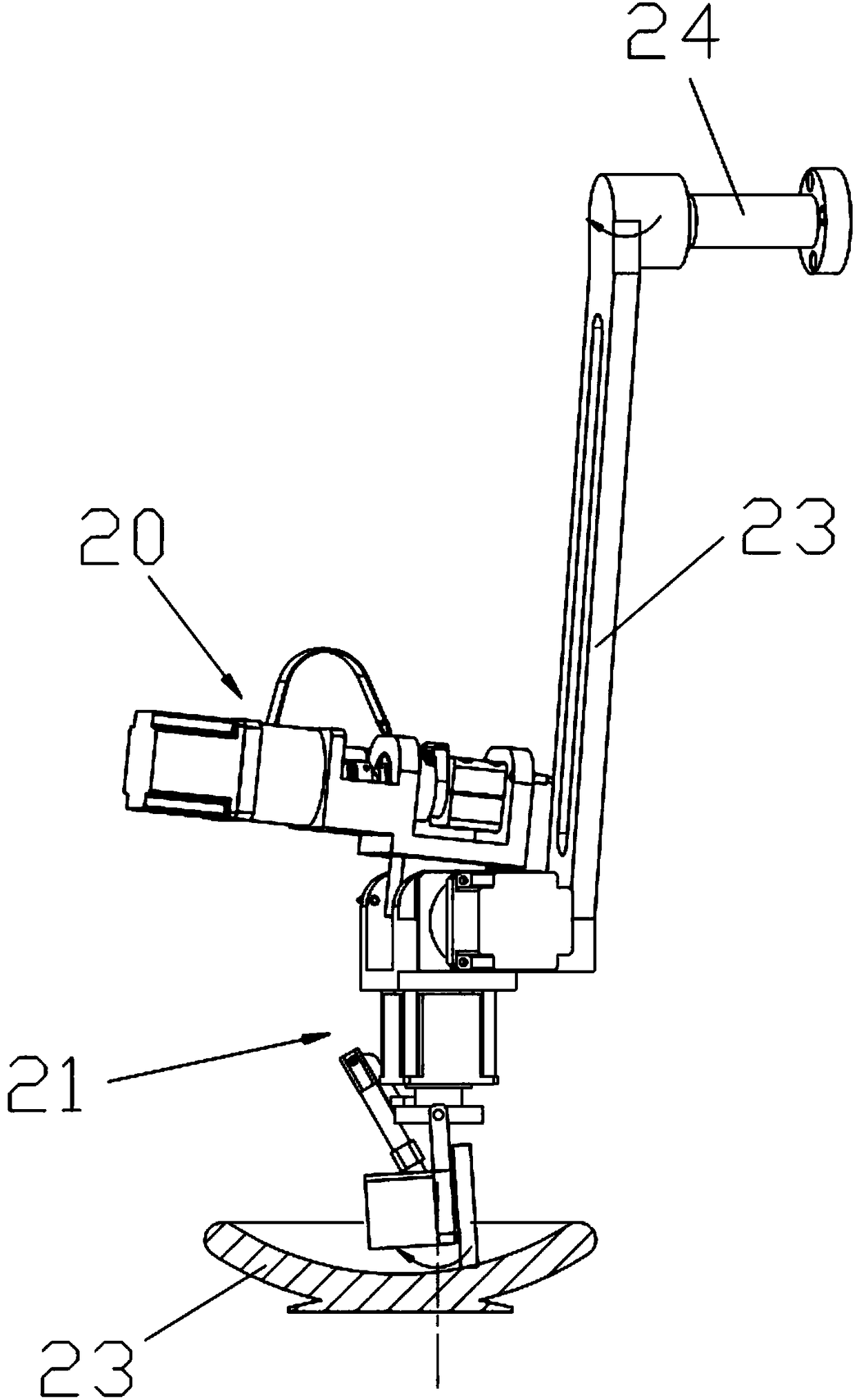
[0045] like Figure 1-Figure 3 As shown, the rehabilitation device capable of exercising the mobility of the shoulder joint and the autonomous force of the arm of the present invention includes a bracket 22 and a rehabilitation training device, wherein the rehabilitation training device includes an arm exercise mechanism 20 for exercising the mobility of the arm, and a device for exercising The shoulder joint exercise mechanism 21 of the shoulder joint mobility, the autonomous force measurement mechanism and the control system, wherein, the support 22 is connected with the arm exercise mechanism 20 by a universal connection structure, and the shoulder exercise mechanism 21 is connected to the arm exercise mechanism. Bottom of body 20 .
[0046] like Figure 5 As shown, the universal connection structure includes a connecting rod 23 and a universal joint, wherein one end of the connecting rod 23 is fixed on the arm exercise mechanism 20, and the other end is connected with the ...
Embodiment 2
[0061] like Figure 12 As shown, the difference between this embodiment and Embodiment 1 is that in this embodiment, the number of the autonomous force measuring mechanisms is three, and these autonomous force measuring mechanisms are arranged along the length direction of the arm fixing plate 1 . The purpose is that, according to the principle of leverage, the distance between the autonomous force measuring mechanism and the first rotating shaft 4 is different, and the force required by the patient to drive the arm fixing plate 1 to bend upward is also different. The closer the distance, the greater the force required. By setting With more than two autonomous force measuring mechanisms, an appropriate autonomous force measuring mechanism can be selected to work according to the size of the patient's autonomous force, and the applicability is better.
Embodiment 3
[0063] like Figure 13 As shown, the difference between this embodiment and Embodiment 1 is that in this embodiment, the connecting rod 23 is provided with a locking screw 33 corresponding to the spherical recess 23-1, and the locking screw 33 Press it on the ball joint 24-1. Its purpose is to make the locking between the spherical dimple 23-1 and the spherical joint 24-1 more firm; during use, if you want to adjust the position of the rehabilitation training device 20, loosen the locking screw 33, and when the rehabilitation training After the position of the device 20 is adjusted, then tighten the locking screw 33.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More