Robot grasping assembly
A robot and component technology, applied in the field of robots, can solve the problems of easy failure, complex design, complex finger structure, etc., and achieve the effect of large grasping force, improved stability, and no breakage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that all the drawings of the present invention are in simplified form and use inaccurate scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
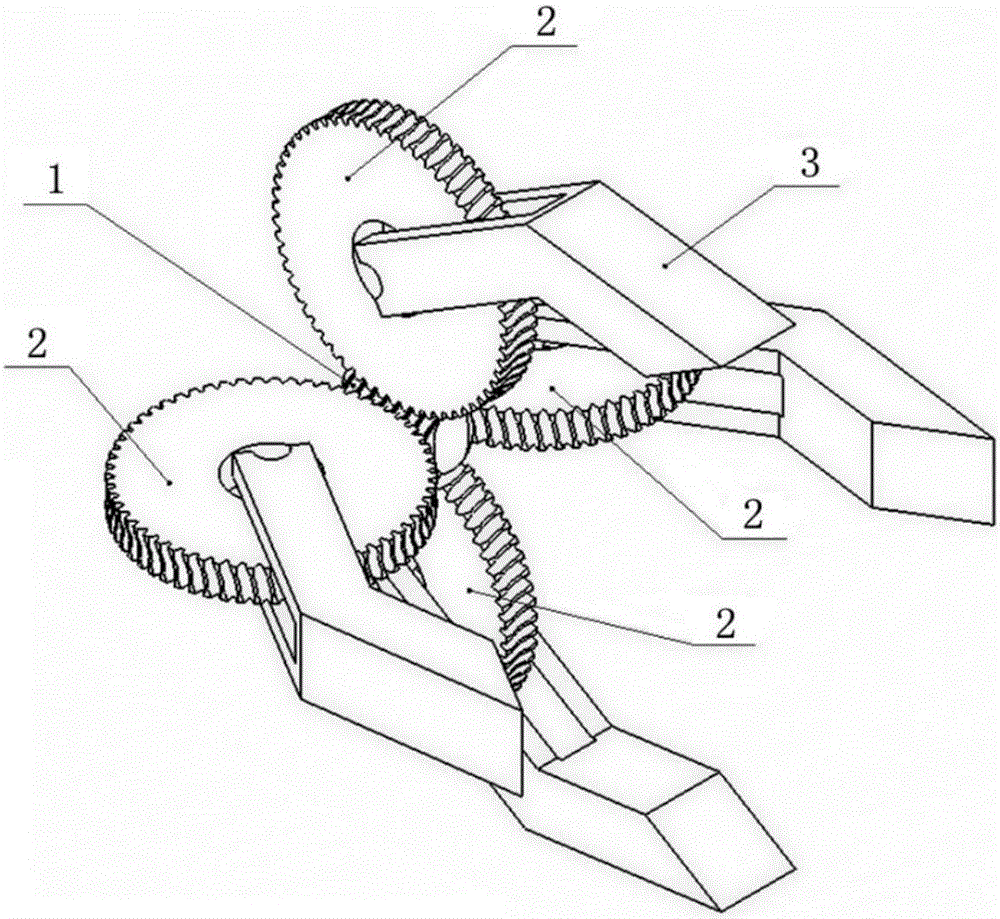
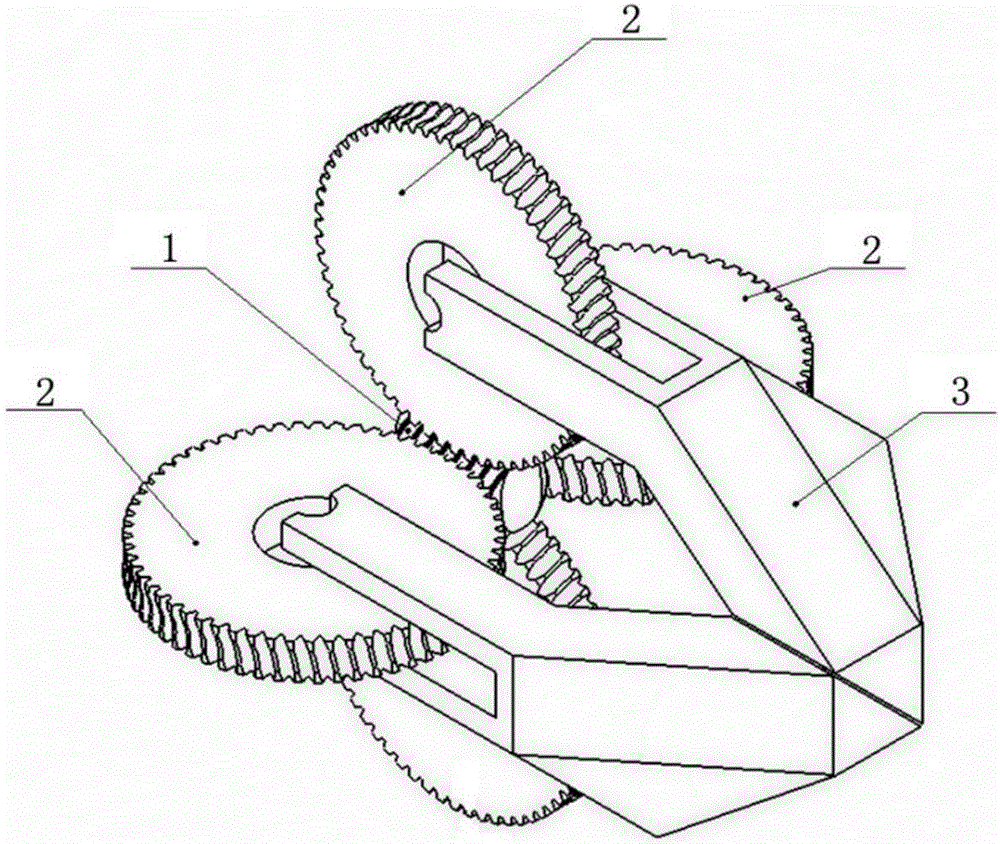
[0022] The robot grasping assembly of the present invention is as figure 1 and figure 2 as shown, figure 1 is the expanded state of the grabber component, figure 2 Is the working state of the grabbing component. The robot grabbing assembly includes a worm 1, four worm wheels 2, and four grippers 3, and the end of each gripper 3 is fixed at the axis of the worm wheel 2. The four worm gears 2 are disc-shaped worm gears, and the edges of the worm gears 2 are provided with worm teeth. The four worm w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com