Industrial robot intelligent picking system
A technology for industrial robots and robot control cabinets, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., to solve problems such as disordered items, low efficiency, and inability to pick up quickly and efficiently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
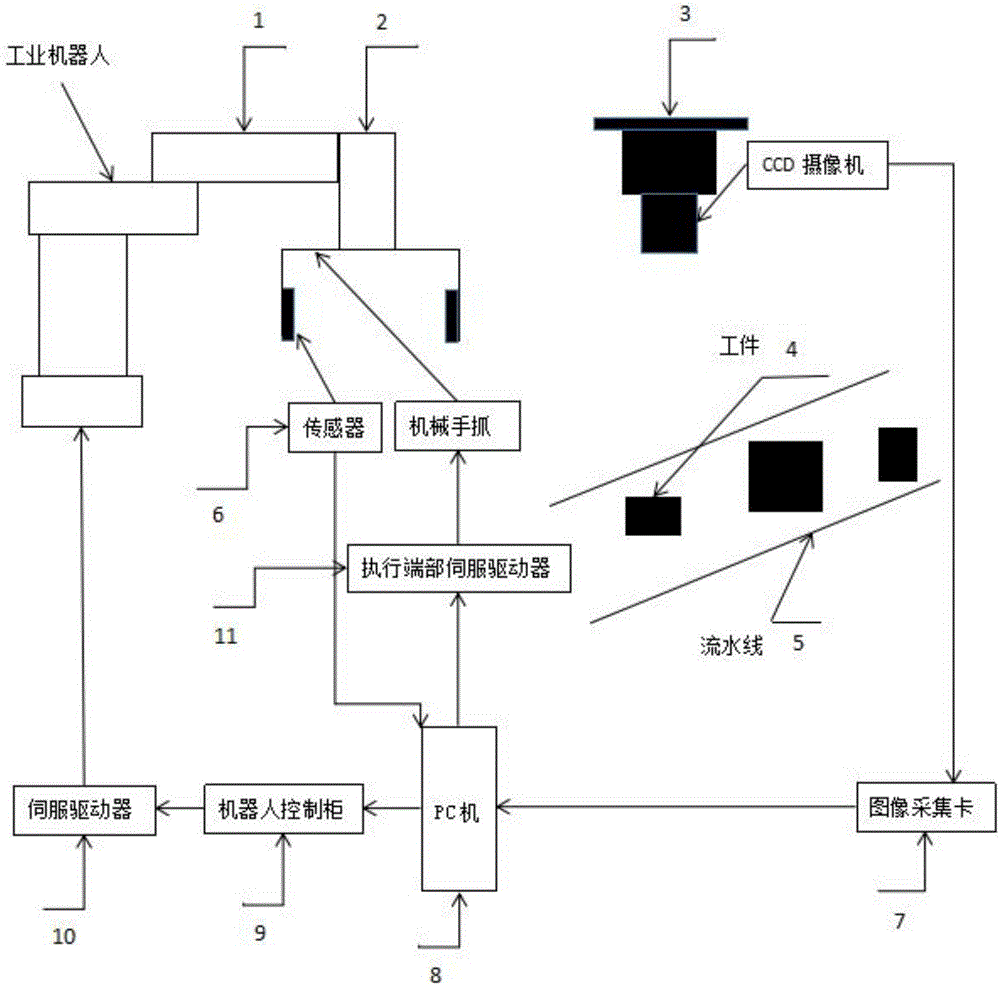
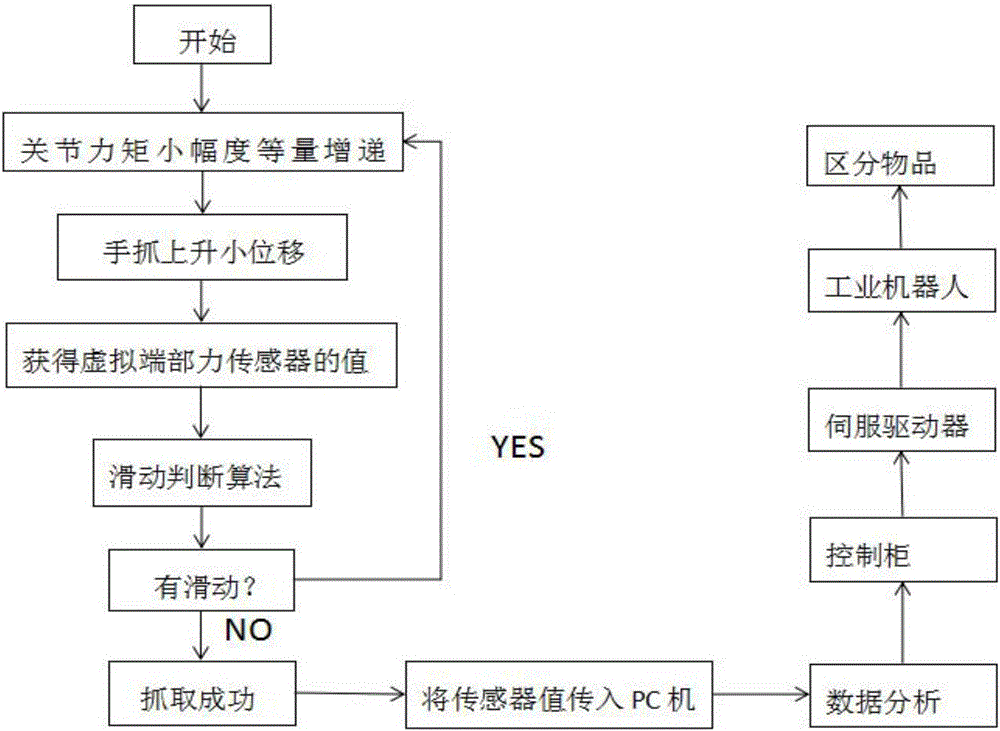
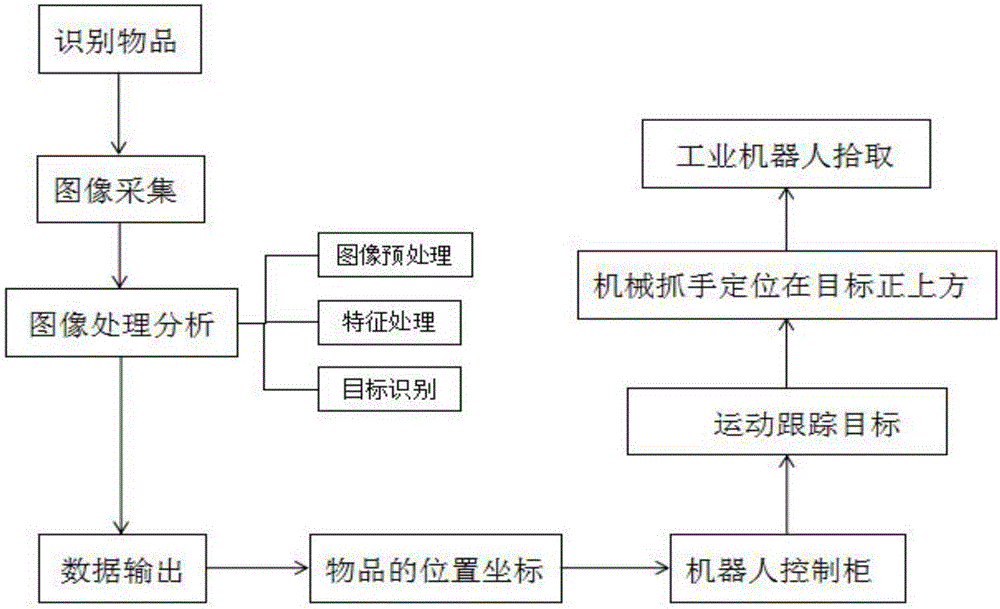
[0020] see figure 1 , are different in size, and the workpieces 4 with random positions are placed on the assembly line 5 . When the workpiece 4 passes by the camera 3, its position is captured by it. The camera 3 collects the original digital image of the target workpiece. After preprocessing such as correction and filtering, feature processing is performed, and the position of the target is estimated based on this, so as to identify the coordinates of the target relative to the robot's base coordinate system. The PC 8 sends the coordinates to the robot control cabinet 9, plans the grabbing trajectory of the robot according to the information of the target point, and moves to track the target. The manipulator 3 is positioned above the target and waits for the workpiece to be grasped. The coordinates of the workpiece are locked by the vision system, and the manipulator 2 runs over the workpiece 4 according to the set trajectory, and then grabs it. Whether the end of the man...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com