

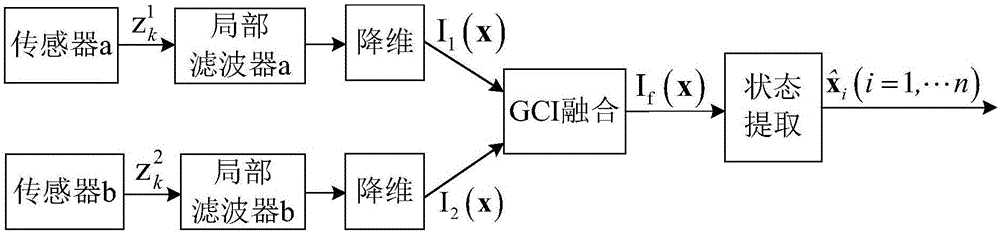
Distributed multi-sensor fusion algorithm based on AMDs
A multi-sensor fusion and distributed technology, applied in the direction of instruments, reflection/re-radiation of radio waves, utilization of re-radiation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Some terms appearing in the present invention are explained below:
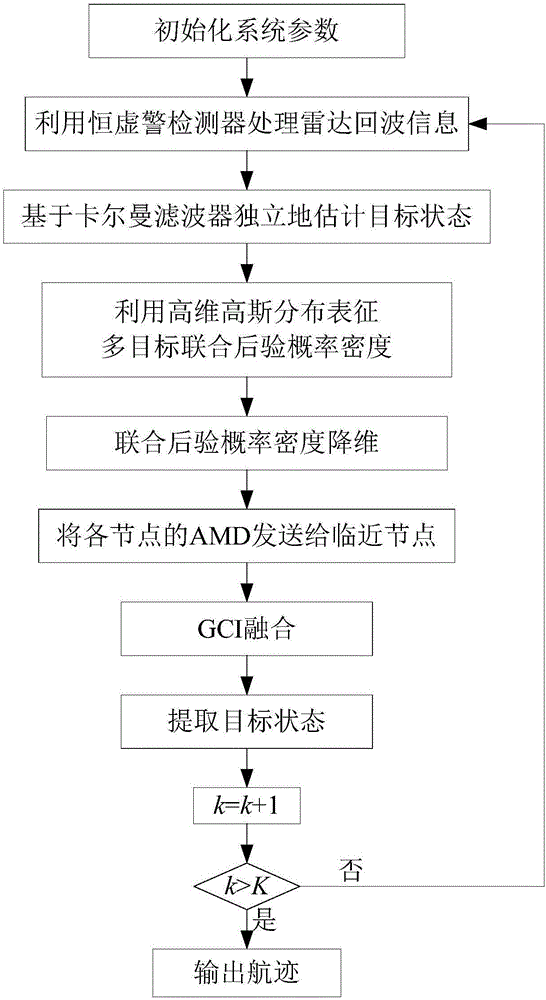
[0053] Constant false alarm detection: a technology dedicated to providing predictable detection and false alarms in actual interference environments, so that the detection threshold can be accurately set. A detector with this characteristic is called a constant false alarm detector .
[0054] Cross-covariance (CI) fusion: cross-covariance fusion algorithm, a data fusion algorithm that considers cross-correlation but does not need to calculate cross-correlation information.
[0055] Generalized cross-covariance (GCI) fusion algorithm: a generalized CI fusion algorithm that can be used for non-Gaussian probability density. The core formula is:
[0056] p ω ( x k | Z 1 : k 1 , Z 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More