

Pipeline inner bore quality detection mini-sized mobile robot and control method therefor
A mobile robot, measurement control technology, applied in the direction of electromagnetic measuring device, electric/magnetic diameter measurement, etc., can solve the problems of low centering accuracy, low detection efficiency, large size, etc., achieve good reconfigurability, improve accuracy, The effect of low coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be described in further detail below in conjunction with the accompanying drawings.
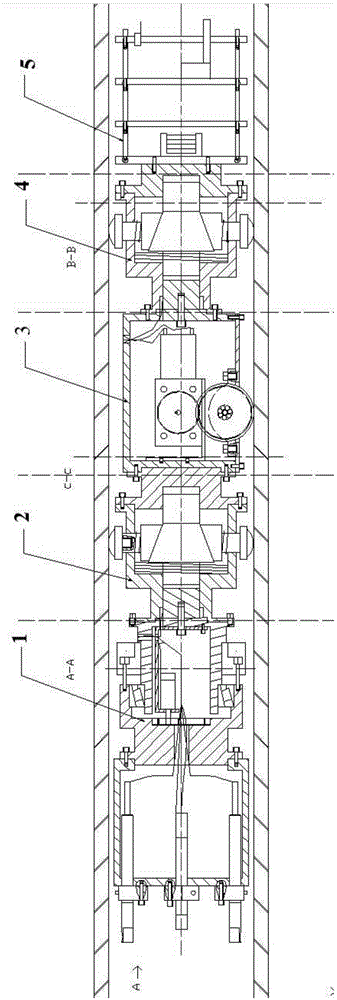
[0054] Such as figure 1 As shown, the micro mobile robot used for quality inspection of pipeline inner holes provided by the present invention includes a rotating scanning module 1 , a front centering and guiding module 2 , a driving walking module 3 , a rear centering and guiding module 4 and a measurement control module 5 . The rotating scanning module 1, the front centering and guiding module 2, the driving walking module 3, the rear centering and guiding module 4, and the measurement control module 5 are coaxially installed and connected in sequence from front to back, and the above five modules have the same common axis O.
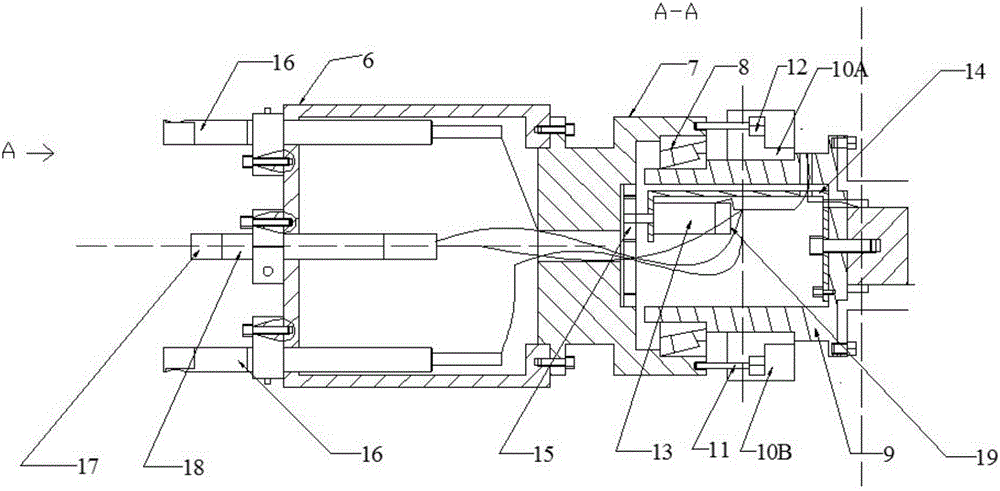
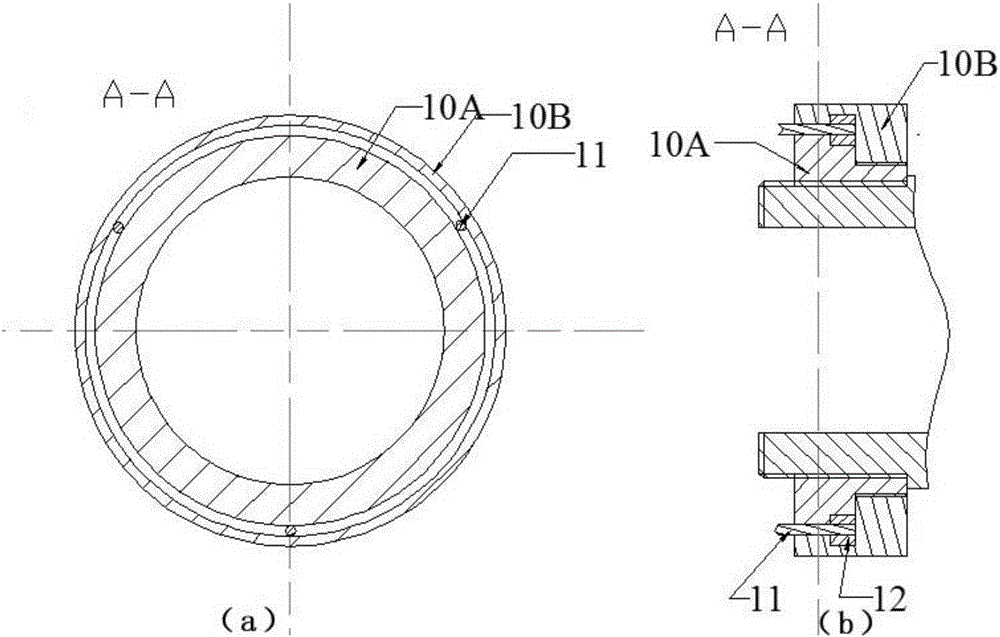
[0055] Such as figure 2 As shown, the rotating scanning module 1 includes a rotating sleeve 6, a rotating base 7, a first rolling bearing 8, a fixed base 9, a rotating cage 10, holding bolts 11, holding nuts 12, scanning motors 13,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More